
O projeto aqui apresentado consiste em desenhar um braço robótico com um lápis numa folha de papel. Um ótimo exercício de programação e controlo de um braço robótico.
Hardware
- Braço robótico prático
- 4x Servomotor SMS1012
- Controlador de servomotor ou shield de servo
- Fonte de alimentação de 5V
- Cabo USB
- Placa Arduino UNO
Objetivo
Objetivo: Desenhar um círculo utilizando um braço robótico
Para levar a cabo este projeto, precisamos de
- Montagem do braço robótico (Estrutura)
- Realizar a montagem eletrónica para controlar o braço e a alimentação eléctrica (Hardware)
- Desenvolver o programa para controlar a sequência de servomotores de modo a descrever uma forma no espaço (Software)
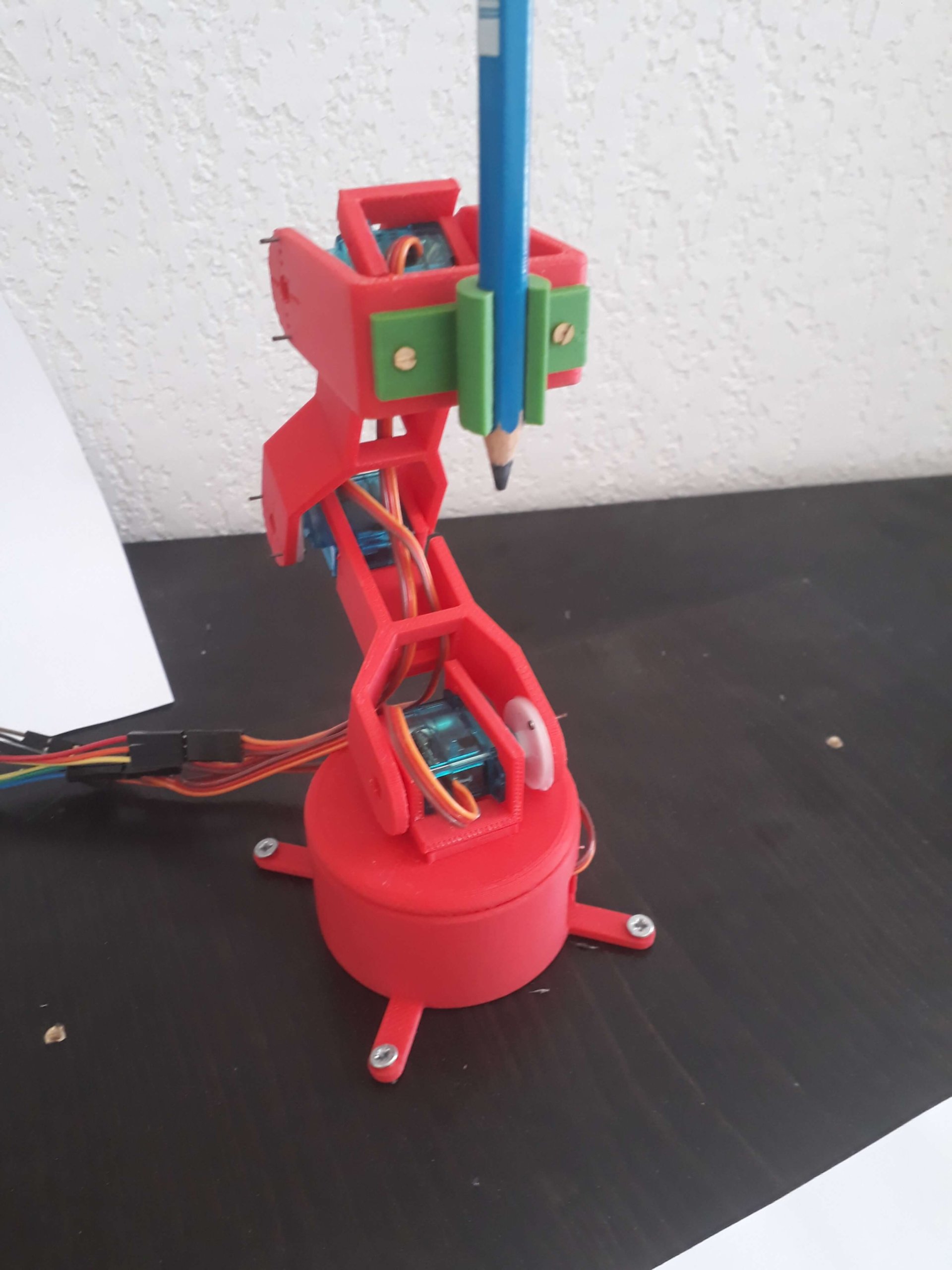
Braço robótico
Objeto: A estrutura deve ser capaz de transportar um lápis e de se deslocar nas três dimensões do espaço.
O braço Handy está a ser utilizado para este projeto. Os motores escolhidos são micro-servomotores 9g leves, económicos e fáceis de utilizar.
O braço é montado com os seus servomotores e o seu suporte é fixado a uma placa. Para este projeto também desenhámos e imprimimos um suporte para lápis, que pode descarregar aqui.
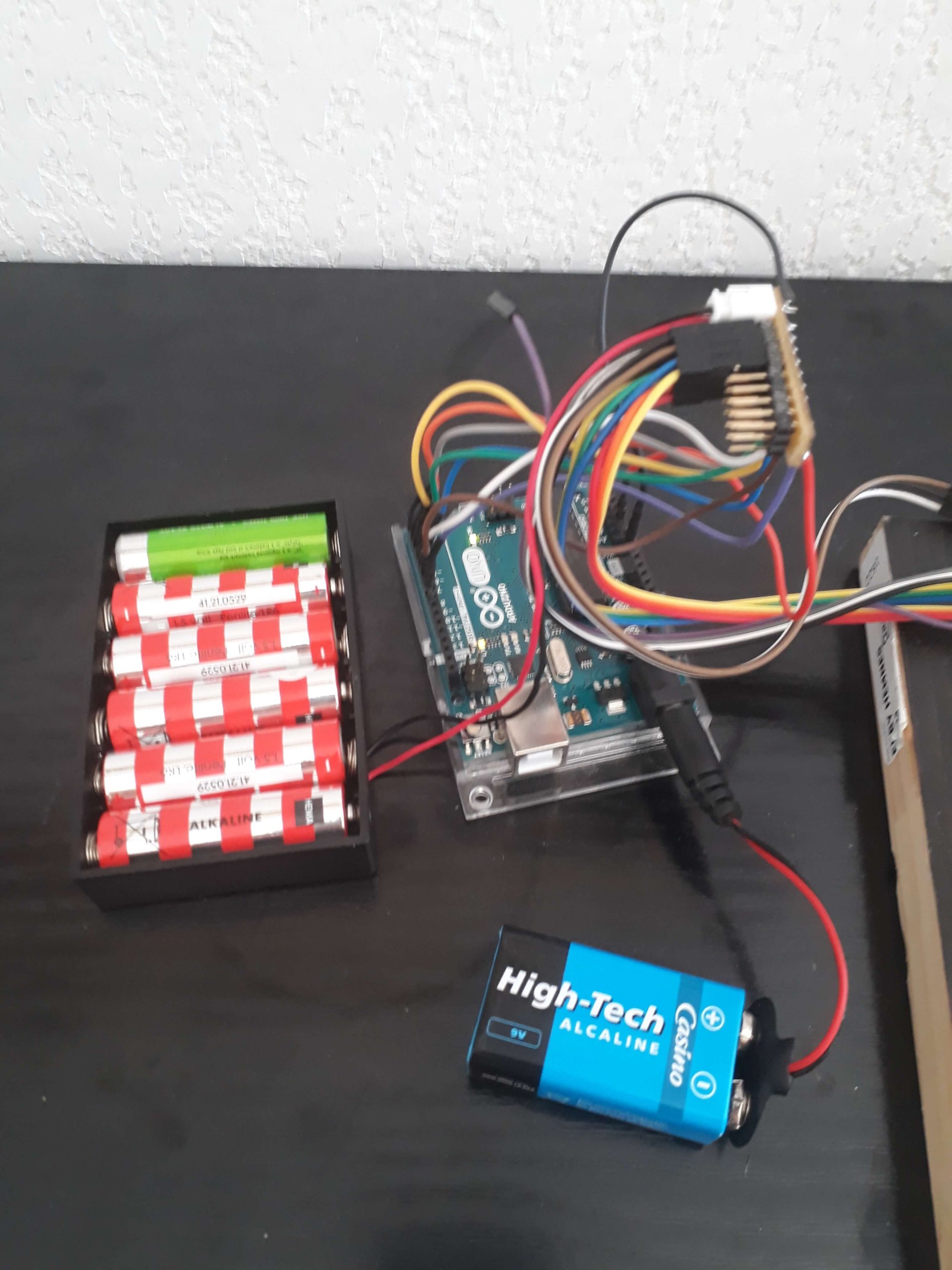
Hardware
Objetivo: A eletrónica deve ser capaz de distribuir a alimentação de energia à placa de comando e aos servomotores e de acionar os servomotores através de um sinal PWM.
- Arduino UNO
As placas Arduino são fáceis de utilizar, com um grande número de bibliotecas disponíveis e uma enorme comunidade de apoio. Como o programa requer um pouco de RAM, optámos pela placa Arduino UNO.
A placa arduino é alimentada pelo PC ou pelo cabo USB.
- Acionamento do servomotor
A placa Arduino não consegue alimentar tantos servomotores, pelo que é necessário adicionar um controlador ao conjunto.
Um driver de servomotor foi construído seguindo este tutorial, e é alimentado por baterias em série.
Software
Objetivo du programme
Vamos escrever os objectivos do programa e dividi-los em tarefas a realizar
- Descrever as coordenadas da forma no espaço
- Transformar as coordenadas espaciais do círculo nos ângulos das articulações do robot.
- Verificação da posição do robot
- Converter os ângulos do robô em comandos do servomotor
- Envio de um comando para o atuador
Descrever as coordenadas da forma no espaço
A forma escolhida é uma circunferência pela sua simplicidade. As equações paramétricas de uma circunferência no espaço são:
Para a coordenada z, consideramos o tamanho do lápis, ou seja, 20 mm.
Escrevemos uma função que devolve a posição alvo do robot Xd como uma função do passo de tempo:
void circleTraj(double R,double x,double y,double z,int i,double Te, float Xd[6]){ Xd[0]=x+R*cos(2*PI*Te*i); Xd[1]=y+R*sin(2*PI*Te*i); Xd[2]=z; Xd[3]=0; Xd[4]=0; Xd[5]=0; }
Transformar as coordenadas espaciais do círculo nos ângulos das articulações do robot.
O braço robótico pode ser descrito como uma cadeia robótica utilizando o método Denavit-Hartenberg. Este método é útil para controlar um braço com mais de três articulações.
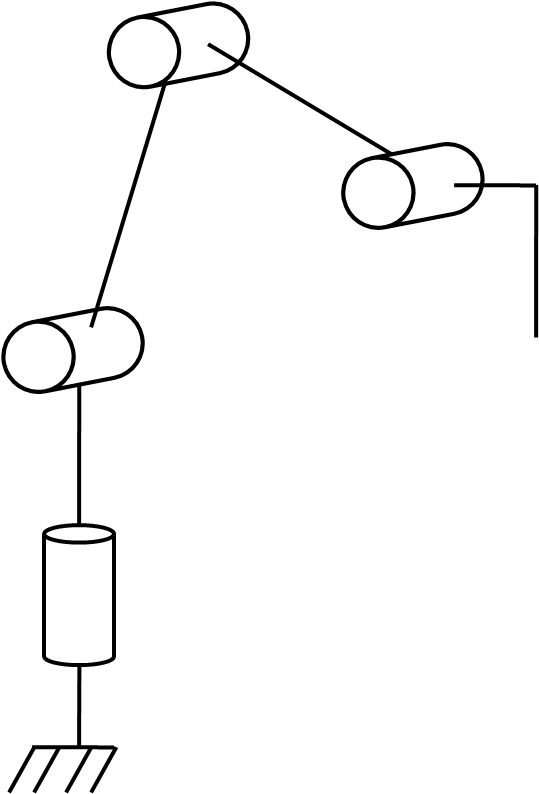
Este método consiste em definir um sistema de coordenadas cartesianas para cada articulação, seguindo a mesma lógica, o que permite definir parâmetros para descrever matematicamente os movimentos de cada elo no espaço.
Definir os parâmetros para cada ligação robótica com base na geometria (parâmetro DH)
| j | Sigmaj | Thetaj | Dj (mm) | Aj (mm) | alphaj |
| 1 | 0 | Th1 | 45 | 0 | 90 |
| 2 | 0 | Th2 | 0 | 75 | 0 |
| 3 | 0 | Th3 | 0 | 75 | 0 |
| 4 | 0 | Th4 | 4 | 0 | -90 |
O cálculo dos ângulos desejados do motor em função da posição desejada envolve a inversão da matriz Jacobiana definida com os parâmetros DH. Para os cálculos da matriz, utilizamos a biblioteca MatrixMath.h‘.
void computeAngle(){ float J[6][nbLinks]; float Jt[nbLinks][6]; float JJt[nbLinks][nbLinks]; float invJ[nbLinks][6]; double detJ; // compute jacobian jacobian(sig,a,al,d,th,q,nbLinks,(float*)J); // avoid singularity Matrix.Transpose((float*)J,6,nbLinks,(float*)Jt); Matrix.Multiply((float*)Jt, (float*)J, nbLinks, 6, nbLinks,(float*)JJt); detJ=detrm(JJt,nbLinks); // invert jacobian if(detJ>=1){ Matrix.Invert((float*)JJt,nbLinks); Matrix.Multiply((float*)JJt,(float*)Jt,nbLinks,nbLinks,6,(float*)invJ); } for(int i=0;i<nbLinks;i++){ qu[i]=0; for(int j=0;j<6;j++){ qu[i]+=invJ[i][j]*Xu[j]; } } }
Função para converter os ângulos do robô em comandos para o servomotor
A conversão dos ângulos em controlo PWM depende do posicionamento dos servomotores, dos valores nominais de PWM e da convenção dos pontos de referência cartesianos utilizados para descrever as articulações do robô no espaço.
| Servo/Joint | Min impulse | Max impulse | Min robot | Max robot |
| 1 | 500 | 2500 | -PI/2 | PI/2 |
| 2 | 500 | 2500 | PI | 0 |
| 3 | 600 | 2600 | -PI/2 | PI/2 |
| 4 | 500 | 2500 | -PI/2 | PI/2 |
int jointToImp(double x,int i) { int imp=(x - joint_min[i]) * (imp_max[i]-imp_min[i]) / (joint_max[i]-joint_min[i]) + imp_min[i]; imp=max(imp,imp_min[i]); imp=min(imp,imp_max[i]); return imp; }
Envio de um comando para o atuador
Para controlar os servomotores, usamos a biblioteca Servo.h disponível como padrão no IDE do Arduino. Escrevemos uma função que envia o comando PWM para cada servomotor de acordo com o ângulo solicitado.
void servoToImp(double q[nbLinks],int velocity){ for (int i=0; i<nbLinks; i++) { servo[i].writeMicroseconds(jointToImp(q[i],i)); delay(velocity); } }
Função de controlo do robô
Para controlar os servomotores, a posição desejada do robô deve ser sempre comparada com a sua posição atual.
Assim, calculamos a posição do robot em função dos ângulos do motor. Para o efeito, utilizamos as matrizes de transformação definidas pelo método de Denavit-Hartenberg.
forwardKinematics(sig,a,al,d,th,q,nbLinks,X);
Aplicar o controlador para calcular a posição seguinte do robot
circleTraj(20,165,0,20,k,Te,Xd); circleTraj(20,165,0,20,k+1,Te,Xk); for(int i=0;i<6;i++) Xu[i]=(Xk[i]-Xd[i]+gain*Te*(Xd[i]-X[i]));
Determinamos os ângulos do motor para atingir a posição seguinte
for(int i=0;i<nbLinks;i++) qN1[i]=q[i]; computeAngle(); for(int i=0;i<nbLinks;i++) q[i]=qN1[i]+qu[i];
O controlo PWM é aplicado a cada servomotor
servoToImp(q,10);
Código completo
Biblioteca personalizada de MatrixMath.h, MatrixMathExt.h
/*****************************************************************\ * Project : Handy * Author : X. Wiedmer * Version : V01 * Date : 08/06/2017 * Revision : * Summary : \*****************************************************************/ // Library #include <SoftwareSerial.h> #include <Servo.h> #include <MatrixMathExt.h> // Pin assignement #define BASE 2 #define SHOULDER 3 #define ARM 4 #define FOREARM 5 #define WRIST 6 //paramètres Denavit-Hartenberg const double baseLength = 45;//mm const double shoulderLength = 10;//mm const double armLength = 75;//mm const double forearmLength = 75;//mm const double wristLength = 40;//mm const int nbLinks=4; double sig[nbLinks]={0,0,0,0}; double a[nbLinks]={0,armLength,forearmLength,wristLength}; double al[nbLinks]={PI/2,0,0,0}; double d[nbLinks]={baseLength,0,0,0}; double th[nbLinks]={0,3*PI/4,-PI/2,-3*PI/4+PI/2}; double restPos[nbLinks]={0,3*PI/4,-PI/2,-3*PI/4+PI/2}; //paramètres servomoteur const int servoPin[nbLinks]={BASE,SHOULDER,ARM,FOREARM}; Servo servo[nbLinks]; const double joint_min[nbLinks]={-PI/2,PI,-2*PI/3,-PI/2}; const double joint_max[nbLinks]={PI/2,0,PI/2,PI/2}; const int imp_min[nbLinks]={500,500,600,500}; const int imp_max[nbLinks]={2500,2500,2600,2500}; //paramètre du contrôle double Te=0.01; // pas de temps du contrôleur double gain=30; // gain du contrôle int N=(int)2/Te+1; // nombre d'étape pour parcourir 2 fois le cercle // Variables float X[6],Xd[6],Xk[6],Xu[6]; double qN1[nbLinks],qu[nbLinks]; double q[nbLinks]={0,3*PI/4,-PI/2,-3*PI/4+PI/2}; int firstShot = 0; // Pour que le programme ne s'exécute qu'une fois /******************************************************************\ * PRIVATE FUNCTION: setup * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Initiate inputs/outputs * \******************************************************************/ void setup(){ Serial.begin(9600); // Initialise le port série for (int i=0; i<nbLinks; i++) { // Initiatlise et positionne les servomoteurs au démarrage servo[i].writeMicroseconds(jointToImp(0,i)); servo[i].attach(servoPin[i]); delay(500); } } /******************************************************************\ * PRIVATE FUNCTION: loop * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Main Function of the code \******************************************************************/ void loop(){ if (firstShot == 0){ //follow trajectory for(int k=0;k<N;k++){ //Calcule la position du robot forwardKinematics(sig,a,al,d,th,q,nbLinks,X); //Calcule la prochaine position circleTraj(20,165,0,20,k,Te,Xd); circleTraj(20,165,0,20,k+1,Te,Xk); for(int i=0;i<6;i++) Xu[i]=(Xk[i]-Xd[i]+gain*Te*(Xd[i]-X[i])); //Calcule les angles moteurs pour atteindre la prochaine position for(int i=0;i<nbLinks;i++) qN1[i]=q[i]; computeAngle(); for(int i=0;i<nbLinks;i++) q[i]=qN1[i]+qu[i]; //Envoie la commande au servomoteur servoToImp(q,10); // Affiche les angles moteur à chaque itération Serial.print("-----------------Iteration "); Serial.println(k); Serial.print("angle base = "); Serial.println(q[0]); Serial.print("angle bras = "); Serial.println(q[1]); Serial.print("angle avant-bras = "); Serial.println(q[2]); Serial.print("angle poignet = "); Serial.println(q[3]); } firstShot=1; } if(firstShot==1){ Serial.println("robot au repos"); restR(); Serial.println("robot stop"); stopR(); firstShot=2; } } // Decrit la trajectoire dans l'espace en focntion du temps void circleTraj(double R,double x,double y,double z,int i,double Te, float Xd[6]){ Xd[0]=x+R*cos(2*PI*Te*i); Xd[1]=y+R*sin(2*PI*Te*i); Xd[2]=z; Xd[3]=0; Xd[4]=0; Xd[5]=0; } // Calcule la matrice de transformation d'un lien robotique void computeLinkTransform(double a,double al,double d, double th, float T[][4]){ float trans[4][4] = {{cos(th), -sin(th)*cos(al), sin(th)*sin(al), a*cos(th)}, {sin(th), cos(th)*cos(al), -cos(th)*sin(al), a*sin(th)}, { 0, sin(al), cos(al), d }, { 0, 0, 0, 1 } }; Matrix.Copy((float*)trans,4,4,(float*)T); } // Calcule la position de la chaine robotique void forwardKinematics(double* sig,double* a,double* al,double* d,double* th,double* q, int nbLinks, float X[6]){ float A[4][4]={{1, 0, 0, 0}, {0, 1, 0, 0}, {0, 0, 1, 0}, {0, 0, 0, 1}}; float R[4][4]; float Ti[4][4]; // Compute transformation matrix for (int i=0; i<nbLinks; i++){ if (sig[i]==0){ th[i]=q[i]; }else{ d[i]=q[i]; } //A=A*Ti computeLinkTransform(a[i],al[i],d[i],th[i],Ti); Matrix.Multiply((float*)A, (float*)Ti,4, 4,4, (float*)R); Matrix.Copy((float*)R,4,4,(float*)A); } X[0]=A[0][3]; X[1]=A[1][3]; X[2]=A[2][3]; X[3]=0; X[4]=0; X[5]=0; } // Calcule un produit vectoriel void CrossProduct1D(float* a, float* b, float* r){ /*Ex: double v1[3]={1,0,0}; double v2[3]={0,0,1}; double w[3]; CrossProduct1D(v1,v2,w);*/ r[0] = a[1]*b[2]-a[2]*b[1]; r[1] = a[2]*b[0]-a[0]*b[2]; r[2] = a[0]*b[1]-a[1]*b[0]; } // Calcule la matrice jacobienne d'une chaine robotique void jacobian(double* sig,double* a,double* al,double* d,double* th,double* q, int nbLinks, float* J){ float Ti[4][4]; float O[nbLinks+1][3]; float z[nbLinks+1][3]; float A[4][4]={{1, 0, 0, 0}, {0, 1, 0, 0}, {0, 0, 1, 0}, {0, 0, 0, 1}}; float R[4][4]; float v[4]; O[0][0]=0; O[0][1]=0; O[0][2]=0; z[0][0]=0; z[0][1]=0; z[0][2]=1; float v0[4]={0,0,1,1}; for (int i=0; i<nbLinks; i++){ // Compute transformation matrix if (sig[i]==0){ th[i]=q[i]; }else{ d[i]=q[i]; } computeLinkTransform(a[i],al[i],d[i],th[i],Ti); // A=A*T[j]; Matrix.Multiply((float*)A, (float*)Ti,4, 4,4, (float*)R); Matrix.Copy((float*)R,4,4,(float*)A); //Compute joint center and orientation vector O[i+1][0]=A[0][3]; O[i+1][1]=A[1][3]; O[i+1][2]=A[2][3]; Matrix.Multiply((float*)A, (float*)v0,4, 4,1, (float*)v); //z{i}=[v(1); v(2); v(3)]-O{i}; z[i+1][0]=v[0]-O[i+1][0]; z[i+1][1]=v[1]-O[i+1][1]; z[i+1][2]=v[2]-O[i+1][2]; } //Jacobian float tempv[3]; float cprod[3]; for(int i=0;i<nbLinks;i++){ if (sig[i]==0){ // Ji=[z(i-1)xON-O(i-1); z(i-1)] Matrix.Subtract((float*)O[nbLinks], (float*)O[i],1,3,(float*)tempv); CrossProduct1D(z[i],tempv,cprod); J[0*nbLinks+i]=cprod[0]; J[1*nbLinks+i]=cprod[1]; J[2*nbLinks+i]=cprod[2]; J[3*nbLinks+i]=z[i][0]; J[4*nbLinks+i]=z[i][1]; J[5*nbLinks+i]=z[i][2]; }else{ J[0*nbLinks+i]=z[i][0]; J[1*nbLinks+i]=z[i][1]; J[2*nbLinks+i]=z[i][2]; J[3*nbLinks+i]=0; J[4*nbLinks+i]=0; J[5*nbLinks+i]=0; } } } // Calcul le déterminant d'une matrice float detrm(float a[nbLinks][nbLinks],float k) { float s=1,det=0,b[nbLinks][nbLinks]; int i,j,m,n,c; if(k==1) { return(a[0][0]); } else { det=0; for(c=0;c<k;c++) { m=0; n=0; for(i=0;i<k;i++) { for(j=0;j<k;j++) { b[i][j]=0; if(i!=0&&j!=c) { b[m][n]=a[i][j]; if(n<(k-2)) n++; else { n=0; m++; } } } } det=det+s*(a[0][c]*detrm(b,k-1)); s=-1*s; } } return(det); } // Calcule les angles moteur en fonction de la position désirée void computeAngle(){ float J[6][nbLinks]; float Jt[nbLinks][6]; float JJt[nbLinks][nbLinks]; float invJ[nbLinks][6]; double detJ; // compute jacobian jacobian(sig,a,al,d,th,q,nbLinks,(float*)J); // avoid singularity Matrix.Transpose((float*)J,6,nbLinks,(float*)Jt); Matrix.Multiply((float*)Jt, (float*)J, nbLinks, 6, nbLinks,(float*)JJt); detJ=detrm(JJt,nbLinks); // invert jacobian if(detJ>=1){ Matrix.Invert((float*)JJt,nbLinks); Matrix.Multiply((float*)JJt,(float*)Jt,nbLinks,nbLinks,6,(float*)invJ); } for(int i=0;i<nbLinks;i++){ qu[i]=0; for(int j=0;j<6;j++){ qu[i]+=invJ[i][j]*Xu[j]; } } } // Convertie l'angle moteur en commande PWM int jointToImp(double x,int i) { int imp=(x - joint_min[i]) * (imp_max[i]-imp_min[i]) / (joint_max[i]-joint_min[i]) + imp_min[i]; imp=max(imp,imp_min[i]); imp=min(imp,imp_max[i]); return imp; } // Intitialise servomoteur void servoAttach(){ for (int i=0; i<nbLinks; i++) { servo[i].attach(servoPin[i]); } } // Envoie la commande PWM à chaque servomoteur void servoToImp(double q[nbLinks],int velocity){ for (int i=0; i<nbLinks; i++) { servo[i].writeMicroseconds(jointToImp(q[i],i)); delay(velocity); } } // Met le robot en position de repos void restR(){ servoToImp(restPos,500); } // Déconnecte les servomoteurs void stopR(){ for(int j=0;j<nbLinks;j++){ servo[j].detach(); } }
Resultados
O motor desenha na folha e segue a trajetória definida.
Se quiser ajuda com o seu braço robótico ou quiser mais informações sobre este projeto, deixe um comentário ou contacte-nos.
Referência
- programação com Arduino
- Controlar um servomotor com o Arduino
- Método Denavit-Hartenberg (vídeo)