En este tutorial, veremos cómo realizar el reconocimiento de objetos con Python utilizando una red neuronal pre-entrenada utilizando deep learning.
En un tutorial anterior vimos cómo reconocer formas simples mediante visión por ordenador. Este método sólo funciona para ciertas formas simples predefinidas. Si quieres reconocer una mayor variedad de objetos, la forma más sencilla es utilizar la inteligencia artificial.
Hardware
- Un ordenador con una instalación de Python3
- Una camera
Principio
La inteligencia artificial es un campo de la informática en el que el propio programa aprende a realizar determinadas tareas. En particular, el reconocimiento visual. En este tutorial, vamos a utilizar una red neuronal entrenada para reconocer determinadas formas.
Se necesitan muchos datos para poder entrenar correctamente una red neuronal. Se ha demostrado que el aprendizaje es más rápido en una red neuronal entrenada para otra cosa. Por ejemplo, una red neuronal entrenada para reconocer perros se entrenará más fácilmente para reconocer gatos.
Configuración de Python
Si no, puedes descargar e instalar Python 3
A continuación, puede instalar las bibliotecas OpenCV, numpy e imutils necesarias.
pip3 install opencv-python numpy imutilso
python3 -m pip install opencv-python numpy imutilsDescargar el modelo ModelNet-SSD
- archivo prototxt : https://github.com/nikmart/pi-object-detection/blob/master/MobileNetSSD_deploy.prototxt.txt
- archivo caffemodel : https://github.com/nikmart/pi-object-detection/blob/master/MobileNetSSD_deploy.caffemodel
Coloca los archivos del modelo en una carpeta y crea el archivo ObjectRecognition.py

Script en Python para el reconocimiento de objetos
En primer lugar, creamos un flujo de vídeo (vs) utilizando la biblioteca imutils, que recuperará las imágenes de la cámara.
vs = VideoStream(src=0, resolution=(1600, 1200)).start()Inicializamos una red neuronal con los parámetros ModelNet-SSD (net) utilizando la biblioteca OpenCV.
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])A continuación, crearemos un bucle que, en cada iteración, leerá la imagen de la cámara y la pasará a la entrada de la red neuronal para la detección y el reconocimiento de objetos.
while True:
# Get video stream. max width 800 pixels
frame = vs.read()
blob = cv2.dnn.blobFromImage(cv2.resize(frame, (300, 300)), 0.007843, (300, 300), 127.5)
# Feed input to neural network
net.setInput(blob)
detections = net.forward()Por último, el código muestra la casilla de detección y la probabilidad de reconocimiento en la imagen.
label = "{}: {:.2f}%".format(CLASSES[idx],confidence * 100)
cv2.rectangle(frame, (startX, startY), (endX, endY),COLORS[idx], 2)
y = startY - 15 if startY - 15 > 15 else startY + 15
cv2.putText(frame, label, (startX, y),cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2)#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# ObjectRecognition.py
# Description:
# Use ModelNet-SSD model to detect objects
#
# www.aranacorp.com
# import packages
import sys
from imutils.video import VideoStream
from imutils.video import FPS
import numpy as np
import argparse
import imutils
import time
import cv2
# Arguments construction
if len(sys.argv)==1:
args={
"prototxt":"MobileNetSSD_deploy.prototxt.txt",
"model":"MobileNetSSD_deploy.caffemodel",
"confidence":0.2,
}
else:
#lancement à partir du terminal
#python3 ObjectRecognition.py --prototxt MobileNetSSD_deploy.prototxt.txt --model MobileNetSSD_deploy.caffemodel
ap = argparse.ArgumentParser()
ap.add_argument("-p", "--prototxt", required=True,
help="path to Caffe 'deploy' prototxt file")
ap.add_argument("-m", "--model", required=True,
help="path to Caffe pre-trained model")
ap.add_argument("-c", "--confidence", type=float, default=0.2,
help="minimum probability to filter weak detections")
args = vars(ap.parse_args())
# ModelNet SSD Object list init
CLASSES = ["arriere-plan", "avion", "velo", "oiseau", "bateau",
"boteille", "autobus", "voiture", "chat", "chaise", "vache", "table",
"chien", "cheval", "moto", "personne", "plante en pot", "moton",
"sofa", "train", "moniteur"]
COLORS = np.random.uniform(0, 255, size=(len(CLASSES), 3))
# Load model file
print("Load Neural Network...")
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])
if __name__ == '__main__':
# Camera initialisation
print("Start Camera...")
vs = VideoStream(src=0, resolution=(1600, 1200)).start()
#vs = VideoStream(usePiCamera=True, resolution=(1600, 1200)).start()
#vc = cv2.VideoCapture('./img/Splash - 23011.mp4') #from video
time.sleep(2.0)
fps = FPS().start()
#Main loop
while True:
# Get video sttream. max width 800 pixels
frame = vs.read()
#frame= cv2.imread('./img/two-boats.jpg') #from image file
#ret, frame=vc.read() #from video or ip cam
frame = imutils.resize(frame, width=800)
# Create blob from image
(h, w) = frame.shape[:2]
blob = cv2.dnn.blobFromImage(cv2.resize(frame, (300, 300)), 0.007843, (300, 300), 127.5)
# Feed input to neural network
net.setInput(blob)
detections = net.forward()
# Detection loop
for i in np.arange(0, detections.shape[2]):
# Compute Object detection probability
confidence = detections[0, 0, i, 2]
# Suppress low probability
if confidence > args["confidence"]:
# Get index and position of detected object
idx = int(detections[0, 0, i, 1])
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h])
(startX, startY, endX, endY) = box.astype("int")
# Create box and label
label = "{}: {:.2f}%".format(CLASSES[idx],
confidence * 100)
cv2.rectangle(frame, (startX, startY), (endX, endY),
COLORS[idx], 2)
y = startY - 15 if startY - 15 > 15 else startY + 15
cv2.putText(frame, label, (startX, y),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, COLORS[idx], 2)
# enregistrement de l'image détectée
cv2.imwrite("detection.png", frame)
# Show video frame
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
# Exit script with letter q
if key == ord("q"):
break
# FPS update
fps.update()
# Stops fps and display info
fps.stop()
print("[INFO] elapsed time: {:.2f}".format(fps.elapsed()))
print("[INFO] approx. FPS: {:.2f}".format(fps.fps()))
cv2.destroyAllWindows()
vs.stop()
vc.release()
Salidas de imagen para la detección de objetos
Puede utilizar este script con distintos tipos de imagen. Para ello, es necesario adaptar ligeramente el código anterior para modificar la variable «frame» que contiene la imagen que se va a analizar.
- La cámara web de tu ordenador
vs = VideoStream(src=0, resolution=(1600, 1200)).start() while True: frame = vs.read()
- Una camera IP
vc = cv2.VideoCapture('rtsp://user:password@ipaddress:rtspPort')
while True:
ret, frame=vc.read() #from ip cam- La Raspberry Pi Picam
vs = VideoStream(usePiCamera=True, resolution=(1600, 1200)).start() while True: frame = vs.read()
- Un archivo de vídeo
vc = cv2.VideoCapture('./img/Splash - 23011.mp4') #from video
while True:
ret, frame=vc.read() #from video- Un archivo de imagen
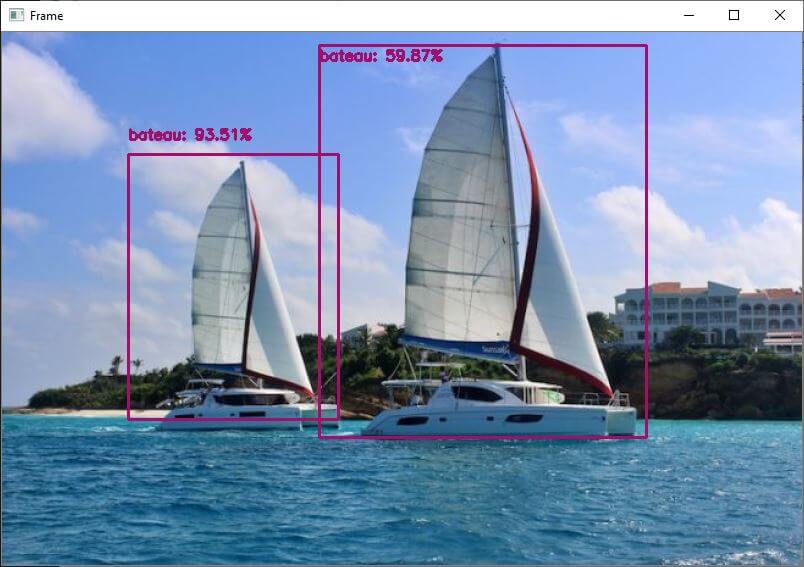
frame= cv2.imread('./img/two-boats.jpg') Resultados
Para este ejemplo, enviamos a la red neuronal una imagen de dos barcos que son reconocidos correctamente. Para obtener resultados ligeramente diferentes, puede modificar el parámetro de confianza para evitar falsos positivos.
Puedes probar este código con tu webcam o con fotos, por ejemplo, para ver cómo funcionan el modelo y el reconocimiento de objetos.
Una vez que tu script funcione, puedes entrenar tu modelo para detectar otros objetos.
Paquetes y modelos
En este tutorial, hemos utilizado el modelo preentrenado ModelNet-SSD. Ten en cuenta que existen otros modelos de reconocimiento como Coco y otras librerías de reconocimiento visual como ImageIA.
No dudes en dejarnos un comentario para compartir las herramientas que utilizas o conoces.



