

O módulo L298N é uma placa de desenvolvimento baseada no IC L298N para a condução de motores CC ou motores passo-a-passo. Já vimos a utilização da ponte H. Pode ser encontrado como um módulo conveniente para utilizar com diferentes desempenhos, dependendo dos componentes utilizados. Veremos neste tutorial a utilização do módulo L298N com um microcontrolador Arduino.
Material
- Computador
- Arduino UNO (ou outro microcontrolador)
- Cabo USB A Macho/B Macho
- Módulo L298N
Princípio funcional
O módulo L298N é baseado no circuito integrado com o mesmo nome. O circuito L298N é uma ponte dupla H que permite mudar a direcção e a intensidade da tensão no terminal de duas cargas eléctricas.
As características do módulo L298N são:
- Controlo do motor de 5 a 35V de tensão nominal
- 2A corrente máxima (pico)
- Tensão de 5V aceite nos pinos de entrada

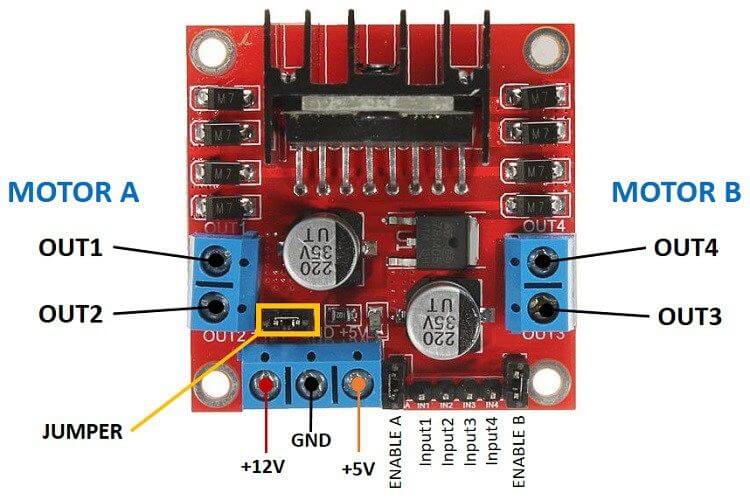
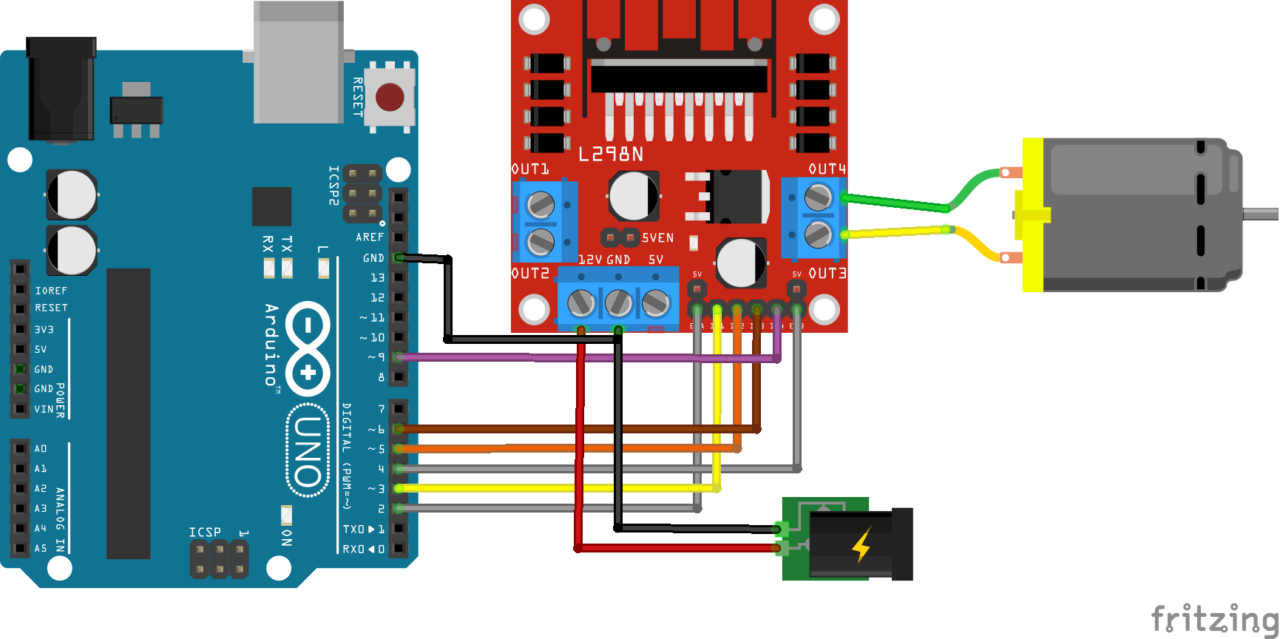
Diagrama de cablagem
O módulo L298N é alimentado por uma fonte de tensão externa. Cada meia-ponte requer 3 pinos de saída de um microcontrolador.
- GND terra IC ligada à terra do microcontrolador e à terra da fonte de alimentação
- ENA permissão do motor M1 ligado ao pino 2
- Input1 Direcção dianteira do motor M1 ligada ao pino 3
- Input2 direcção traseira do motor M1 ligado ao pino 5
- ENB habilitação do motor M2 ligado ao pino 4
- Input3 direcção frontal do motor M2 ligada ao pino 6
- Input4 direcção traseira do motor M2 ligada ao pino 9

Em alguns modelos deste módulo, é possível adicionar dois jumpers para ligar directamente os pinos de activação (ENA e ENB) a 5V. Isto permite activar sempre a ponte H e guardar duas saídas do microcontrolador
Código de gestão do módulo L298N
Para utilizar o módulo L298N, é necessário activar a ponte H, aplicando uma tensão de 5V ao pino EN. Em seguida, enviar um sinal PWM para o pino de Avanço (Entrada1/4) ou Inverter (Entrada2/3) para controlar a direcção e velocidade de rotação. A direcção de rotação para a frente ou para trás depende da direcção da ligação do motor.
//Constants
#define nbL298N 2
//Parameters
const int enaL298NPin[2] = {2, 4};
const int fwdL298NPin[2] = {3, 5};
const int bwdL298NPin[2] = {6, 9};
//Variables
int Power = 200;
void setup() {
//Init Serial USB
Serial.begin(9600);
Serial.println(F("Initialize System"));
//Init DCmotor
for (int i = 0; i < nbL298N; i++) {
pinMode(fwdL298NPin[i], OUTPUT);
pinMode(bwdL298NPin[i], OUTPUT);
pinMode(enaL298NPin[i], OUTPUT);
}
}
void loop() {
testL298N();
}
void testL298N() { /* function testL298N */
////Scenario to test H-Bridge
for (int i = 0; i < nbL298N; i++) {
digitalWrite(enaL298NPin[i], HIGH);
analogWrite(bwdL298NPin[i], 0);
for (int j = 0; j <= Power; j = j + 10) {
analogWrite(fwdL298NPin[i], j);
delay(20);
}
for (int j = Power; j >= 0; j = j - 10) {
analogWrite(fwdL298NPin[i], j);
delay(20);
}
delay(2000);
}
}
Resultado
Uma vez carregado o código, deverá ver os motores a funcionar numa direcção e depois na outra.
Aplicações
- Controlo da velocidade e direcção de rotação de dois motores CC ou de um motor passo-a-passo
Fontes
Retrouvez nos tutoriels et d’autres exemples dans notre générateur automatique de code
La Programmerie