
Com o seu robô montado e a parte eletrônica funcionando corretamente, é hora de lhe dar sua funcionalidade. A funcionalidade é o “Quem sou eu?” e o “O que estou fazendo aqui? “de um robô. São perguntas existenciais que só você poderá responder.
No caso de um robô móvel, sua atividade favorita é se deslocar. E nada melhor do que deslocar-se autonomamente para cumprir suas próprias tarefas. Para que o robô possa mover-se de forma autônoma, precisa ser capaz de detectar o ambiente ao redor, mais precisamente os obstáculos, e conseguir desviar-se deles.
Material
- Robô móvel Rovy
- 4 x TTGM
- DC Motor Driver (aqui usamos um Arduino Mega prototyping shield e 2 pontes H SN754410)
- Bateria de 7.4V
- Sensor de distância HC-SR04 (ou GP2Y0A21 ou outro)
- Arduino Mega
Estrutura
Neste projeto utilizamos o robô móvel Rovy, mas esta solução pode ser aplicada a qualquer tipo de robô móvel.


Hardware
- Microcontrolador
A placa deve ter entradas e saídas suficientes para controlar duas pontes H. Aqui usamos um Arduino Mega, mas um UNO bastaria.
- Driver
Para controlar a velocidade e a direção de um motor CC, é comum utilizar pontes H como a SN754410.
- HC-SR04
Sensor de distância a ultrassom para detecção de obstáculos
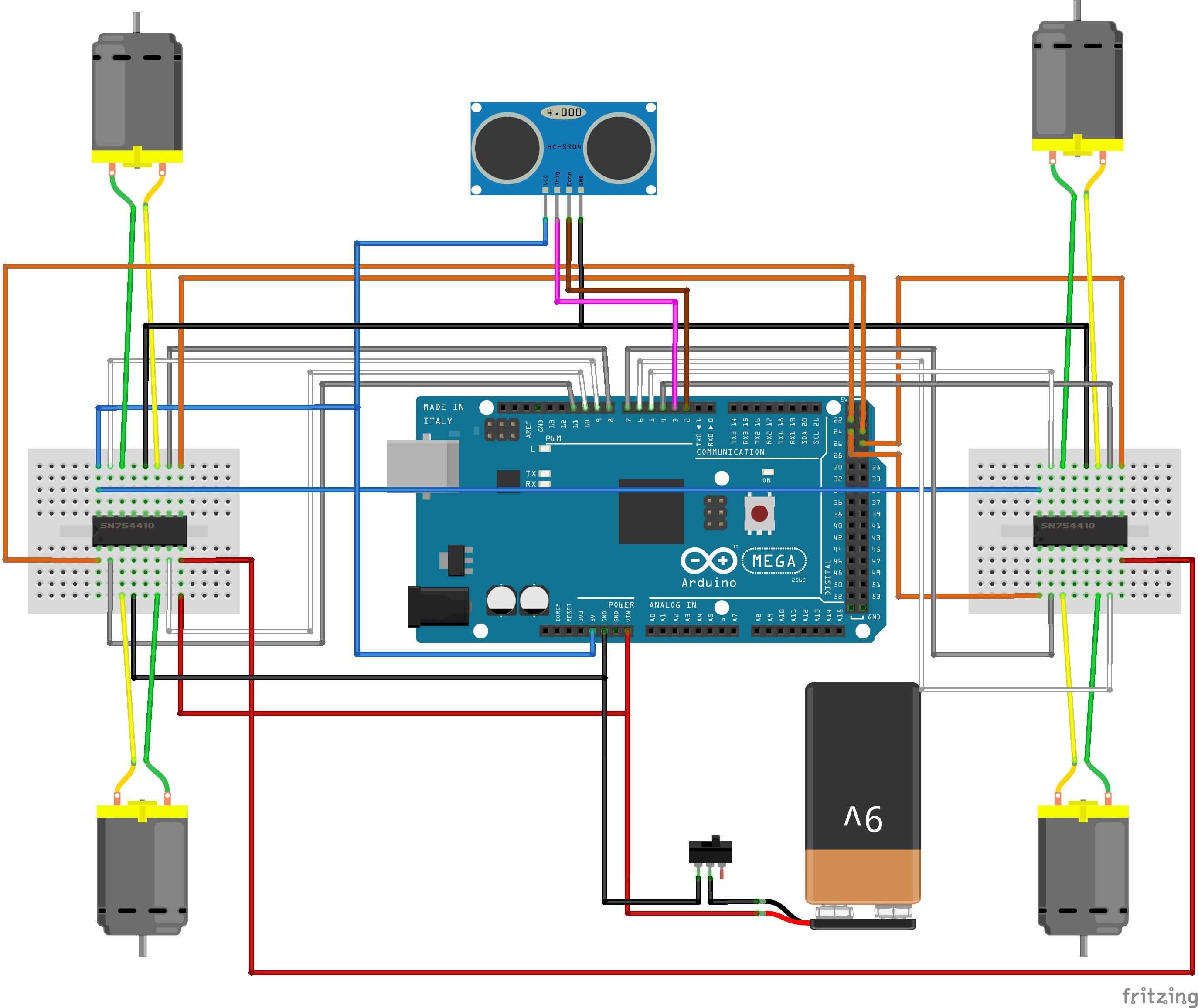
Esquema de montagem

Princípio do algoritmo
Este robô dispõe de um sensor de distância fixo na parte dianteira. A estratégia para desvio de obstáculos é bem simples, pois não exige muita informação além da presença ou não de obstáculos. Para acrescentar alguns dados, vamos fazer o robô olhar para esquerda e direita ao encontrar um obstáculo e determinar qual lado está mais desimpedido. Isto equivale a ter o sensor montado num servomotor que varre da esquerda para a direita (mas sem o servomotor, vejam só).
Para descrever os movimentos do robô e organizar a arquitetura do código, vamos criar uma máquina de estados. Isto permite determinar claramente uma sequência de ações em função dos acontecimentos. No nosso caso, o robô seguirá uma sequência de estados que vai lhe permitir evitar obstáculos (ou não). Uma maneira simples de programar isto no Arduino é usando o switch…case.
Outra ferramenta que utilizamos neste algoritmo é a biblioteca Timer.h, que permite sequenciar ações. No nosso caso, queremos que o sensor seja lido apenas a cada 100 m.
Software
O programa a ser implementado no Arduino pode ser dividido em etapas simples: ler a medida do sensor, selecionar um estado do robô em função do valor da medida e controlar os motores de acordo com o estado selecionado.
Ler o valor do sensor de distância
Para ler o sensor de forma contínua sem perturbar o funcionamento do robô, usaremos a biblioteca Timer.h, que permite lançar uma função a intervalos fixos de tempo. O funcionamento desta biblioteca é semelhante ao exemplo BlinkWithoutDelay, que usa a função millis().
Para clareza de leitura, usamos a biblioteca HC-SR04.h. Criamos uma função de leitura que colocamos no temporizador. Para chamar a função, basta escrever sensorTimer->Update(); em vez de readSensor();
//Bibliotheque #include <SR04.h> #include "Timer.h" // Sensor definition #define TRIG_PIN 3 #define ECHO_PIN 2 SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN); long dist,leftVal,rightVal; Timer *sensorTimer = new Timer(100); void setup(){ sensorTimer->setOnTimer(&readSensor); sensorTimer->Start(); } void loop(){ sensorTimer->Update(); } void readSensor() { dist=sr04.Distance(); Serial.print(dist); Serial.println("cm"); if(dist<40){ if (sensorState==OBS_NO) sensorState=OBS_OK; }else if(dist>80){ sensorState=OBS_NO; } }
Estratégia de desvio
Dependendo do estado do sensor e do robô, escolhemos o procedimento a ser seguido. Se não houver obstáculos, avançamos. Se houver, ativamos o procedimento de desvio:
- recuar;
- olhar para a direita (virar à direita) e salvar o valor do sensor;
- depois à esquerda (virar à esquerda) e salvar o valor do sensor;
- Dependendo do valor do sensor de cada lado, seguir para a esquerda ou para a direita até que um novo obstáculo seja detectado.
void autonomousMode(){ switch (sensorState){ case OBS_NO: GoForward(Power); break; case OBS_OK: GoBackward(Power); sensorState=OBS_SEARCH_RIGHT; delay(200); break; case OBS_SEARCH_RIGHT: TurnRight(Power); sensorState=OBS_SEARCH_LEFT; delay(300); sensorTimer->Update(); rightVal=dist; break; case OBS_SEARCH_LEFT: TurnLeft(Power); sensorState=OBS_ESCAPE; delay(2*300); sensorTimer->Update(); leftVal=dist; break; case OBS_ESCAPE: if(leftVal-rightVal>=5){ sensorState=OBS_ESC_LEFT; }else{ sensorState=OBS_ESC_RIGHT; } break; case OBS_ESC_LEFT: TurnLeft(Power); delay(200); break; case OBS_ESC_RIGHT: TurnRight(Power); delay(200); break; default: //SFAULT MotorStop(); break; } }
Funções de deslocamento do robô
Veja aqui como conduzir um motor CC.
void movementEnable(){ digitalWrite(enableBridge1,HIGH); digitalWrite(enableBridge2,HIGH); digitalWrite(enableBridge3,HIGH); digitalWrite(enableBridge4,HIGH); } void movementDisable(){ digitalWrite(enableBridge1,LOW); digitalWrite(enableBridge2,LOW); digitalWrite(enableBridge3,LOW); digitalWrite(enableBridge4,LOW); } void GoForward(int Power){ analogWrite(MotorForward1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorForward2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorForward3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorForward4,Power); analogWrite(MotorReverse4,0); } void GoBackward(int Power){ analogWrite(MotorForward1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorForward2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorForward3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorForward4,0); analogWrite(MotorReverse4,Power); } void TurnRight(int Power){ analogWrite(MotorForward1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorForward2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorForward3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorForward4,0); analogWrite(MotorReverse4,Power); } void TurnLeft(int Power){ analogWrite(MotorForward1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorForward2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorForward3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorForward4,Power); analogWrite(MotorReverse4,0); } void Stop(){ analogWrite(MotorForward1,0); analogWrite(MotorReverse1,0); analogWrite(MotorForward2,0); analogWrite(MotorReverse2,0); analogWrite(MotorForward3,0); analogWrite(MotorReverse3,0); analogWrite(MotorForward4,0); analogWrite(MotorReverse4,0); movementDisable(); }
Código completo
//Bibliotheque #include <SR04.h> #include "Timer.h" // Sensor definition #define TRIG_PIN 3 #define ECHO_PIN 2 SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN); long dist,leftVal,rightVal; enum sState{ SFAULT, OBS_NO, OBS_OK, OBS_SEARCH_LEFT, OBS_SEARCH_RIGHT, OBS_ESCAPE, OBS_ESC_LEFT, OBS_ESC_RIGHT }; int sensorState=OBS_NO; // Motors definition const int enableBridge1 = 22; const int enableBridge2 = 23; const int enableBridge3 = 24; const int enableBridge4 = 25; const int MotorForward1 = 11; const int MotorReverse1 = 10; const int MotorForward2 = 8; const int MotorReverse2 = 9; const int MotorForward3 = 7; const int MotorReverse3 = 6; const int MotorForward4 = 4; const int MotorReverse4 = 5; // Variables int Power = 80; //Motor velocity Timer *sensorTimer = new Timer(100); /******************************************************************\ * PRIVATE FUNCTION: setup * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Initiate inputs/outputs * \******************************************************************/ void setup(){ //pinMode(Pin, INPUT/OUTPUT); pinMode(MotorForward1,OUTPUT); pinMode(MotorReverse1,OUTPUT); pinMode(MotorForward2,OUTPUT); pinMode(MotorReverse2,OUTPUT); pinMode(MotorForward3,OUTPUT); pinMode(MotorReverse3,OUTPUT); pinMode(MotorForward4,OUTPUT); pinMode(MotorReverse4,OUTPUT); pinMode(enableBridge1,OUTPUT); pinMode(enableBridge2,OUTPUT); pinMode(enableBridge3,OUTPUT); pinMode(enableBridge4,OUTPUT); sensorTimer->setOnTimer(&readSensor); sensorTimer->Start(); delay(500); } /******************************************************************\ * PRIVATE FUNCTION: loop * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Main Function of the code \******************************************************************/ void loop(){ sensorTimer->Update(); autonomousMode(); } void autonomousMode(){ switch (sensorState){ case OBS_NO: GoForward(Power); break; case OBS_OK: GoBackward(Power); sensorState=OBS_SEARCH_RIGHT; delay(200); break; case OBS_SEARCH_RIGHT: TurnRight(Power); sensorState=OBS_SEARCH_LEFT; delay(300); sensorTimer->Update(); rightVal=dist; break; case OBS_SEARCH_LEFT: TurnLeft(Power); sensorState=OBS_ESCAPE; delay(2*300); sensorTimer->Update(); leftVal=dist; break; case OBS_ESCAPE: if(leftVal-rightVal>=5){ sensorState=OBS_ESC_LEFT; }else{ sensorState=OBS_ESC_RIGHT; } break; case OBS_ESC_LEFT: TurnLeft(Power); delay(200); break; case OBS_ESC_RIGHT: TurnRight(Power); delay(200); break; default: //SFAULT MotorStop(); break; } } /******************************************************************\ * PRIVATE FUNCTION: readSensor * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void readSensor() { dist=sr04.Distance(); Serial.print(dist); Serial.println("cm"); if(dist<40){ if (sensorState==OBS_NO) sensorState=OBS_OK; }else if(dist>80){ sensorState=OBS_NO; } } /******************************************************************\ * PRIVATE FUNCTION: movementEnable * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Enable motor control \*****************************************************************/ void movementEnable(){ digitalWrite(enableBridge1,HIGH); digitalWrite(enableBridge2,HIGH); digitalWrite(enableBridge3,HIGH); digitalWrite(enableBridge4,HIGH); } /******************************************************************\ * PRIVATE FUNCTION: movementDisable * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Disable motor control \*****************************************************************/ void movementDisable(){ digitalWrite(enableBridge1,LOW); digitalWrite(enableBridge2,LOW); digitalWrite(enableBridge3,LOW); digitalWrite(enableBridge4,LOW); } /******************************************************************\ * PRIVATE FUNCTION: GoForward * * PARAMETERS: * ~ int Power motor velocity * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void GoForward(int Power){ analogWrite(MotorForward1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorForward2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorForward3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorForward4,Power); analogWrite(MotorReverse4,0); } /******************************************************************\ * PRIVATE FUNCTION: GoBackward * * PARAMETERS: * ~ int Power motor velocity * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void GoBackward(int Power){ analogWrite(MotorForward1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorForward2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorForward3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorForward4,0); analogWrite(MotorReverse4,Power); } /******************************************************************\ * PRIVATE FUNCTION: TurnRight * * PARAMETERS: * ~ int Power motor velocity * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void TurnRight(int Power){ analogWrite(MotorForward1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorForward2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorForward3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorForward4,0); analogWrite(MotorReverse4,Power); } void TurnLeft(int Power){ analogWrite(MotorForward1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorForward2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorForward3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorForward4,Power); analogWrite(MotorReverse4,0); } void MotorStop(){ analogWrite(MotorForward1,0); analogWrite(MotorReverse1,0); analogWrite(MotorForward2,0); analogWrite(MotorReverse2,0); analogWrite(MotorForward3,0); analogWrite(MotorReverse3,0); analogWrite(MotorForward4,0); analogWrite(MotorReverse4,0); movementDisable(); }
Resultado

Se quiser mais informações sobre este projeto, pode nos deixar um comentário ou escrever uma mensagem.

