

Um MPCNC é um acrónimo para “Mostly Printed CNC”, o que significa que é construído principalmente a partir de peças impressas em 3D. É uma máquina CNC (Controlo Numérico Computadorizado) que pode efetuar operações de maquinagem, gravação, corte ou fresagem em diferentes materiais, como madeira, plástico ou alumínio. A MPCNC foi concebida para ser acessível e fácil de construir, graças à sua arquitetura modular e à utilização de componentes electrónicos comuns. Baseia-se no princípio de uma fresadora de pórtico ou Laser, em que um carro móvel se desloca ao longo de 3 eixos (X e Y principalmente, e Z para ajustar ligeiramente a altura da ferramenta) enquanto a ferramenta efectua operações no material. O MPCNC pode ser controlado por um software CNC, que envia instruções precisas aos motores para mover os eixos de acordo com as coordenadas especificadas. Aqui, estamos a usar o MPCNC da V1 Engineering, para construir o nosso próprio cortador de gravura e laser. A placa Ramps 1.4 é uma placa de expansão eletrónica utilizada em impressoras 3D e máquinas CNC. O termo “Ramps” é um acrónimo de “RepRap Arduino Mega Pololu Shield”. Foi especificamente concebida para funcionar com a plataforma Arduino Mega e oferece um
Hardware
- Cartão Ramps 1.4
- Arduino Mega 2560
- 5 Motores de passo: 17HS15-1504S-X1
- 3 Controladores de motor de passo: DRV8825
- Fonte de alimentação Saída 12V e 20A: S-250-12
- 1 laser de 20W: LD4070HA
- Fios.
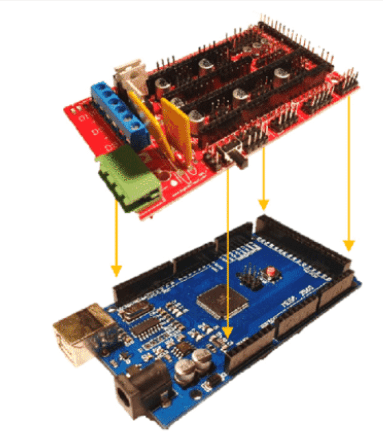
Montagem de rampas 1.4 no Arduino Mega
Uma vez montada a estrutura do seu MPCNC, é necessário montar a eletrónica, e para isso vamos começar com o Ramps 1.4. Como descrito acima, este é um Shield para uma placa Arduino Mega, o que torna a montagem bastante simples. Tudo o que tem de fazer é empilhar os pinos das duas placas:

De seguida, colocamos os jumpers para os controladores. Precisamos de ligar os pinos que ficarão por baixo dos controladores na placa, tais como :

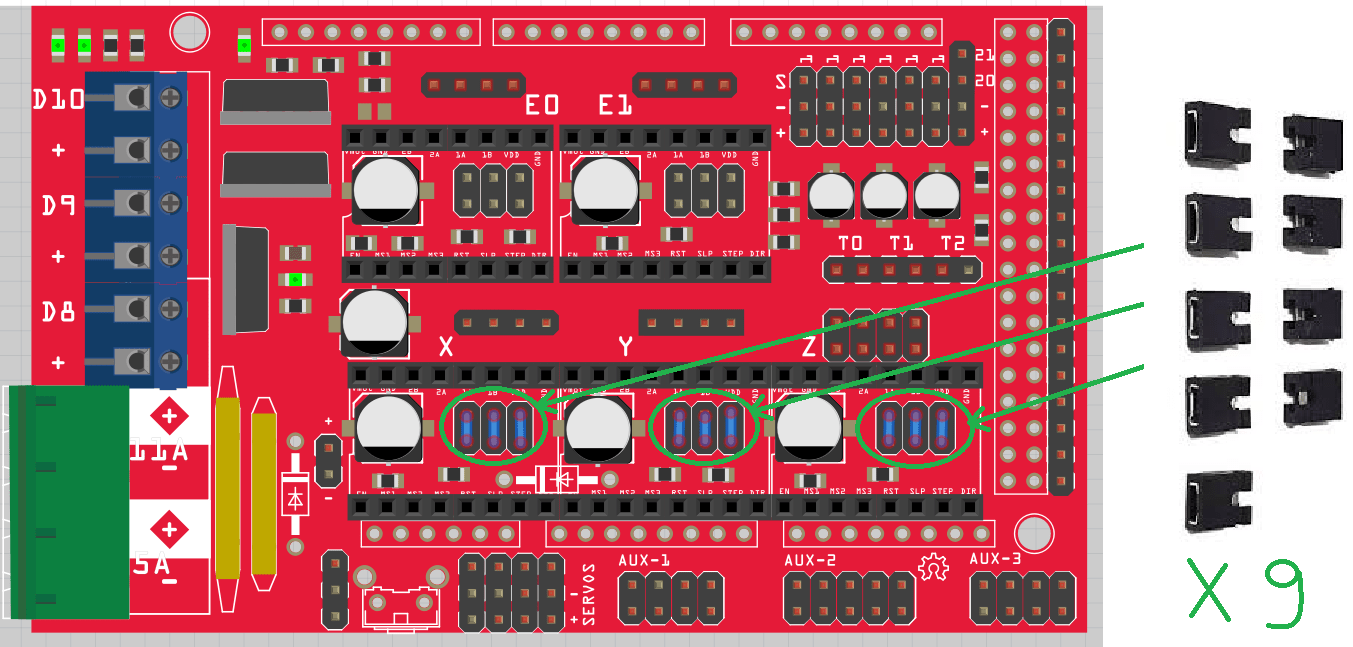
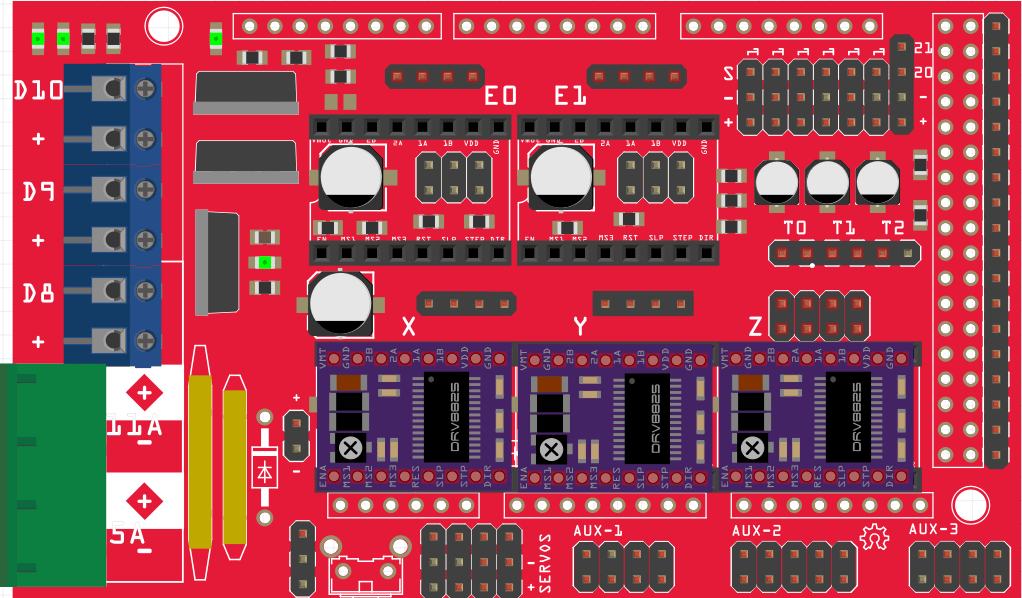
De seguida, passamos para os controladores dos motores de passo, que permitem a comunicação entre os motores e a placa. Têm também a função muito importante de limitar a corrente nos motores para evitar o sobreaquecimento. Basta ligá-los aos pinos correctos dos jumpers, tais como :

Regulação do potenciómetro para cada condutor
É MUITO importante fazer este passo corretamente, porque se a corrente for demasiado elevada, provocará o sobreaquecimento dos motores, o que acabará por danificá-los durante longos períodos. Vamos começar por calcular a corrente máxima que pode passar pelos motores. Aqui, para o DRV8825, temos a seguinte equação: Corrente Limite = VREF x 2VREF é a tensão medida nos terminais do driver e ajustada com o potenciómetro e Corrente Limite é a Corrente/Fase consumida pelo seu motor, valor indicado na folha de dados do seu motor passo a passo. Aqui, para o 17HS15-1504S-X1, temos Corrente/Fase = 1,5 ADo saber o valor de VREF, temos VREF = Corrente limite / 2 = 1,5 / 2 = 0,75 V.No entanto, aqui, os nossos motores de passo não transportam cargas pesadas, que requerem mais corrente. 0,75 V sendo o máximo, podemos reduzir este valor para limitar o sobreaquecimento dos motores, para 60%. Assim, VREF(diminuiu) = 0,75 x 0,6 = 0,45 V.
Agora, depois de ligar a sua placa à fonte de alimentação de 12V (lembre-se de ajustar a tensão de saída da fonte de alimentação com uma chave de fendas e medindo a tensão através das saídas), pegue num multímetro e meça a VREF através dos terminais do controlador da seguinte forma:

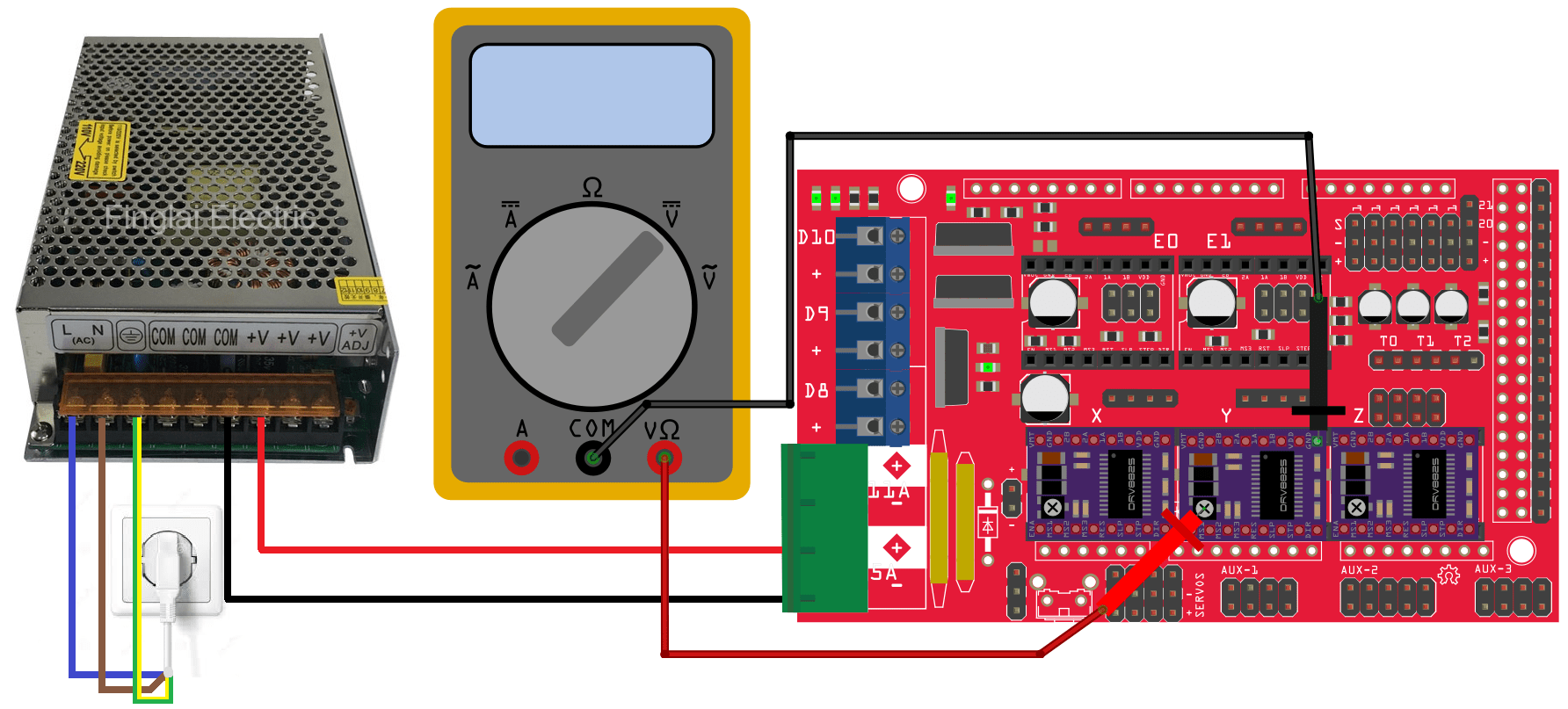
É possível medir a VREF diretamente entre a terra do controlador e o potenciómetro. Para ajustar, é necessária uma chave de fendas bastante fina para manipular o parafuso do potenciómetro e alterar o valor de VREF para a tensão desejada, neste caso 0,45V.
Ligação de motores passo a passo
Uma vez definido o VREF, pode ligar os motores de passo. Pode ver aqui que, na nossa máquina, temos dois motores passo a passo para cada um dos eixos X e Y, o que significa que têm de ser ligados em série para que possam ser controlados pelo mesmo controlador. Também podem ser ligados em paralelo, mas desaconselhamos vivamente que o façam, uma vez que consumiriam mais corrente.

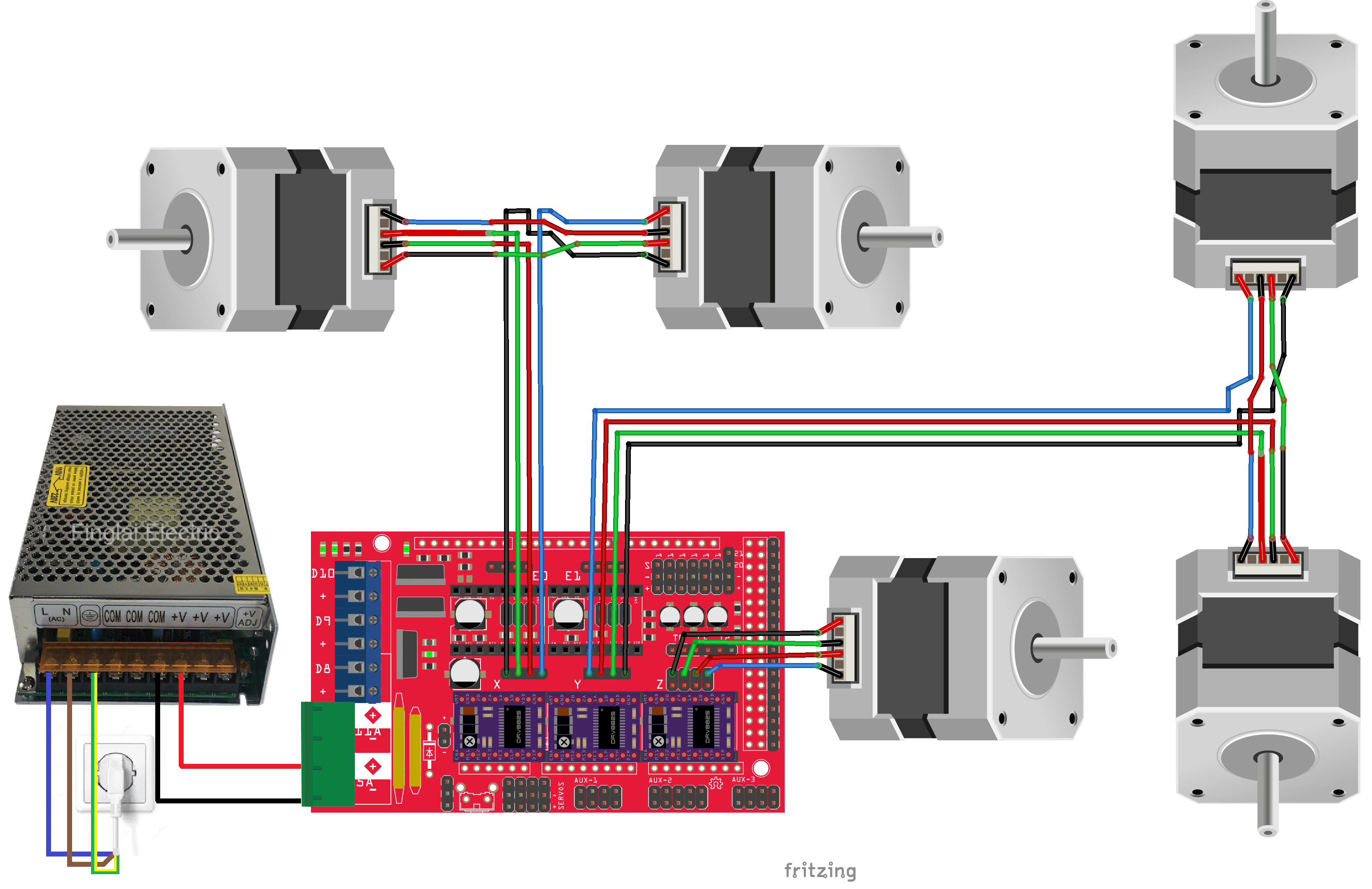
Pode ver que os motores passo a passo estão ligados em série, o que significa que os cabos têm de ser cortados e novamente soldados. As cores indicadas neste diagrama são as dos cabos normalmente vendidos com os motores passo a passo. Preste muita atenção à ordem dos cabos quando os ligar. Além disso, pode notar que o eixo Y no diagrama não tem as cores dos cabos na mesma ordem que os outros, mas na ordem inversa. Isto é normal, pode inverter a ordem das cores ligadas à placa Ramps 1.4 para inverter o sentido de rotação dos motores, de modo a que estes correspondam à sua instalação. Terá de fazer alguns testes para saber se rodam no sentido correto.
Ligação laser
Este é um passo que pode variar porque depende da ferramenta que está a ligar ao seu MPCNC. Aqui, tomaremos como exemplo o laser LD4070HA 20W. Vamos alimentá-lo com 12V através do pino D9 e controlar a potência do laser através do pino Digital 11 em PWM.

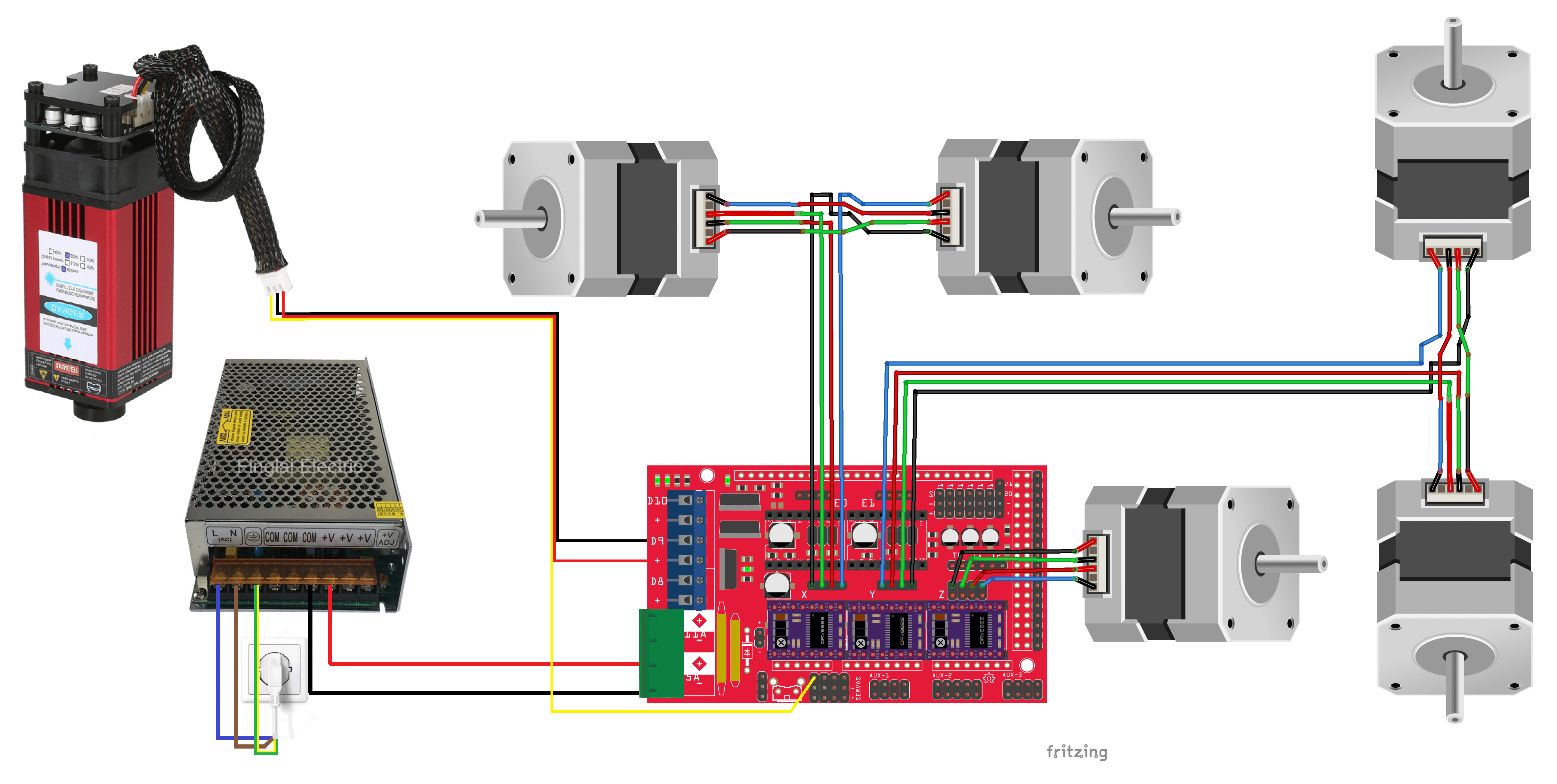
A cablagem eléctrica está agora concluída! Para o software e o firmware, pode seguir este tutorial.
Fontes :
- https://docs.v1e.com/electronics/ramps/
- https://docs.v1e.com/mpcnc/intro/
- https://docs.v1e.com/electronics/steppers/
- https://forum.v1e.com/t/stepper-motor-voltage/18573
- https://www.youtube.com/watch?v=89BHS9hfSUk
- http://voidmicro.com/Products/Laser/LD4070HA-en.html?page=page_laser