

O objetivo deste tutorial é construir uma placa de controle para servomotores (servo shield), que permita distribuir os sinais PWM de uma placa Arduino (ou outra) bem como a potência de alimentação aos servomotores
Material
- alicate plano
- estilete
- ferro de soldar
- barra de pinos
- fios para conexão
- conector macho para a bateria
Eletrônica
Para controlar um conjunto de servomotores com a placa Arduino, é preciso utilizar um circuito impresso. Há diferentes métodos para isso, como usar um “servo shield” do tipo Maestro (Pololu) ou ainda construir o seu próprio driver.
1. A placa de ensaio

Na placa que usamos neste tutorial, todas as entradas de uma mesma fileira são ligadas entre si por uma faixa de cobre.
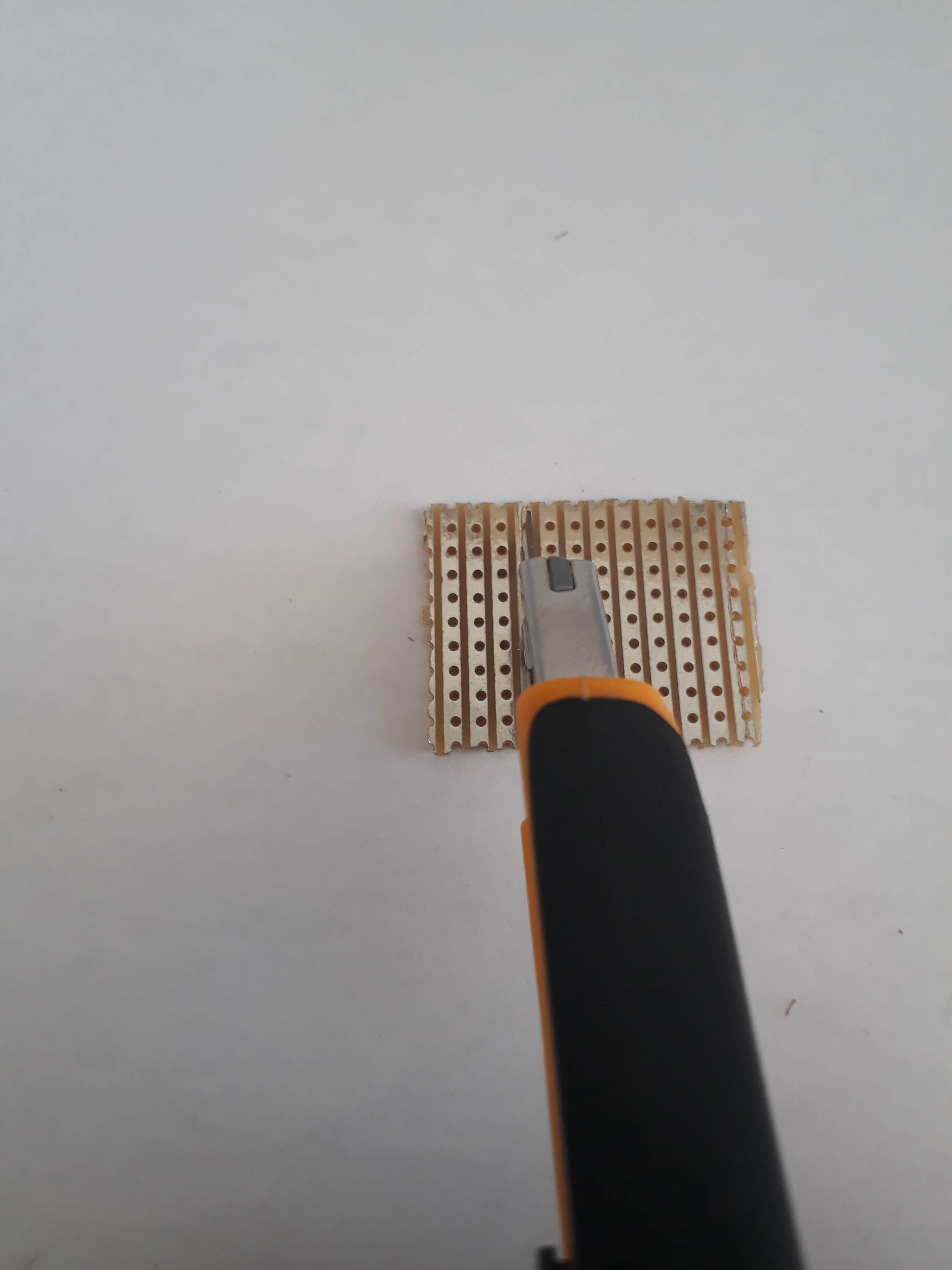
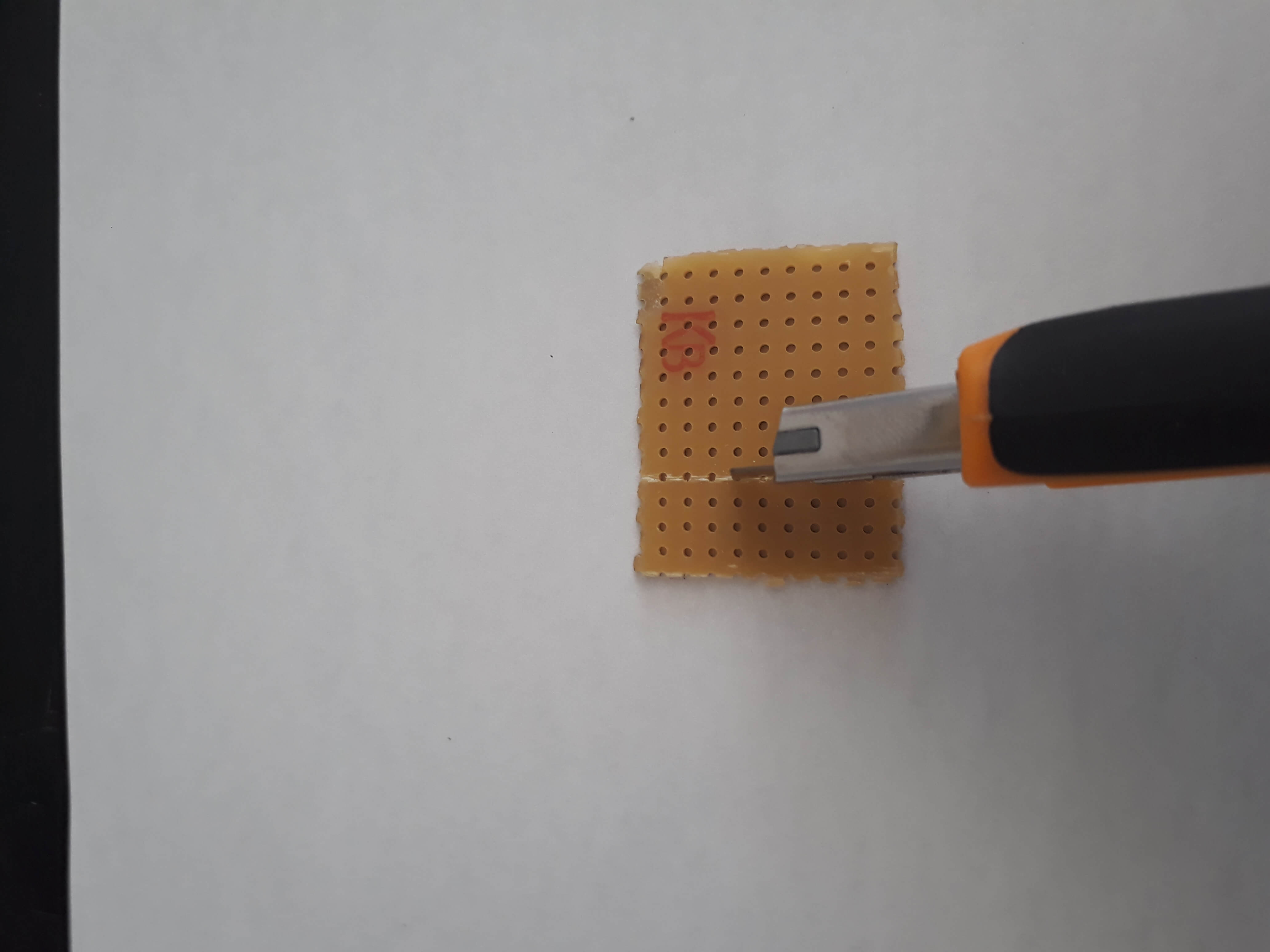
Para começar, corte a placa para obter a quantidade desejada de furos (em geral, 3x o número de servomotores + 2 fileiras extra para a bateria). Passe o estilete várias vezes sobre a fileira onde pretende cortar a placa. Isto enfraquece o plástico e permite quebrá-lo com mais precisão.


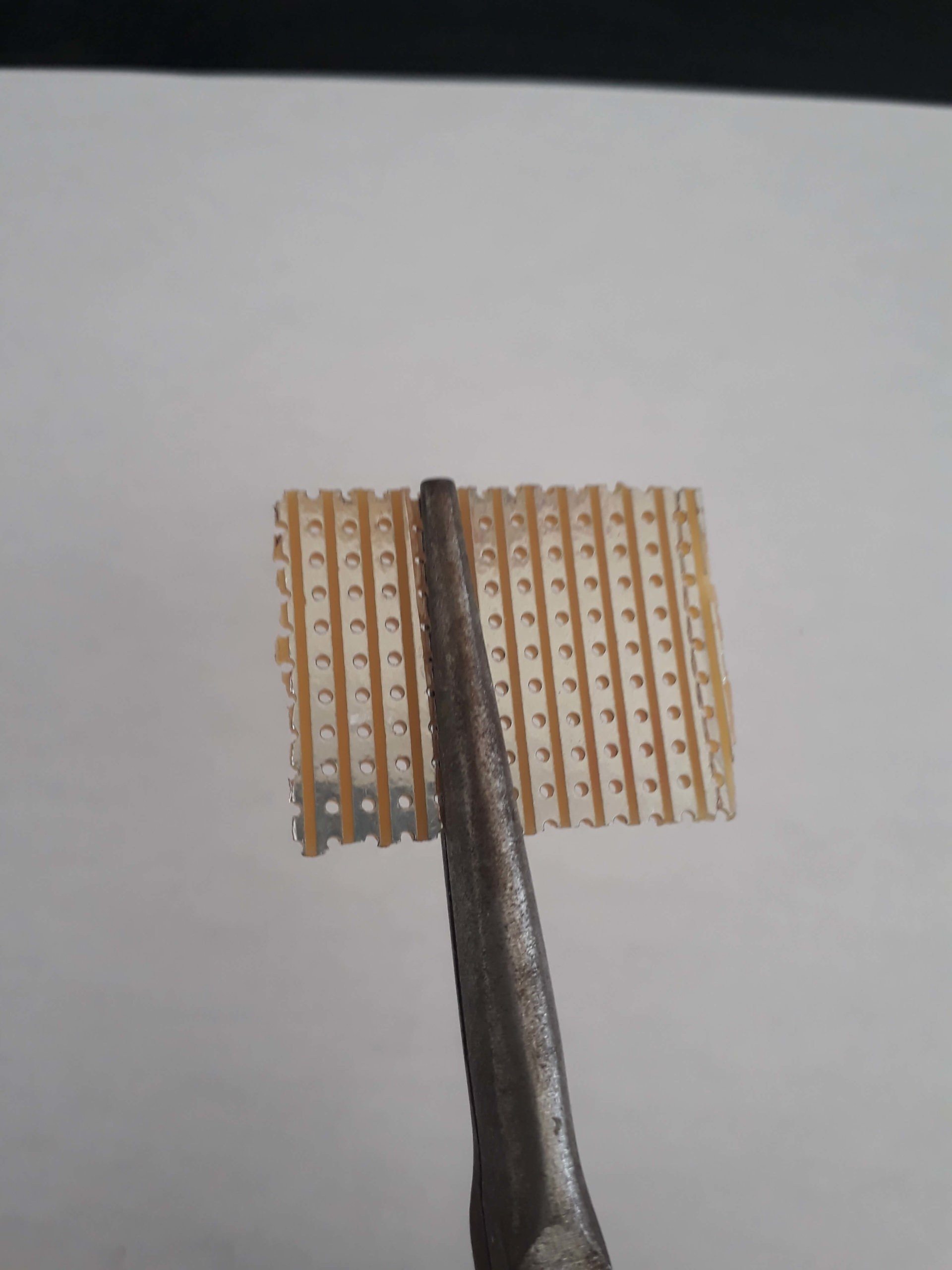
Em seguida, use o alicate para separar as duas partes seguindo a linha que riscou com o estilete.

Depois de cortar a placa, pode remover o cobre sobressalente nas extremidades usando o estilete ou uma lixa.
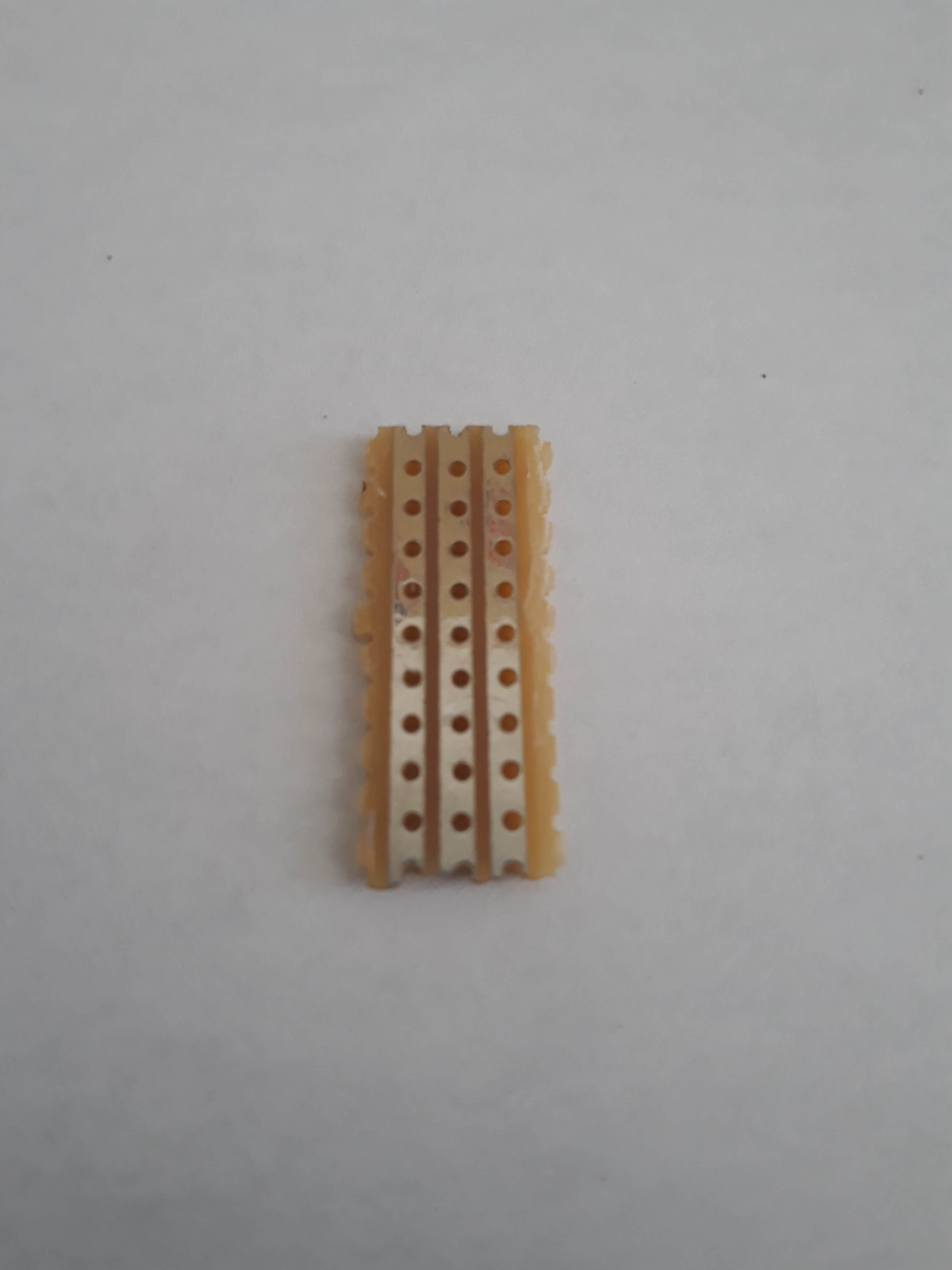
Com o estilete, separe as entradas da fileira onde as entradas PWM se conectam, para garantir o isolamento elétrico entre as passagens.

Para conferir esta etapa, pode usar um multímetro para verificar o isolamento.

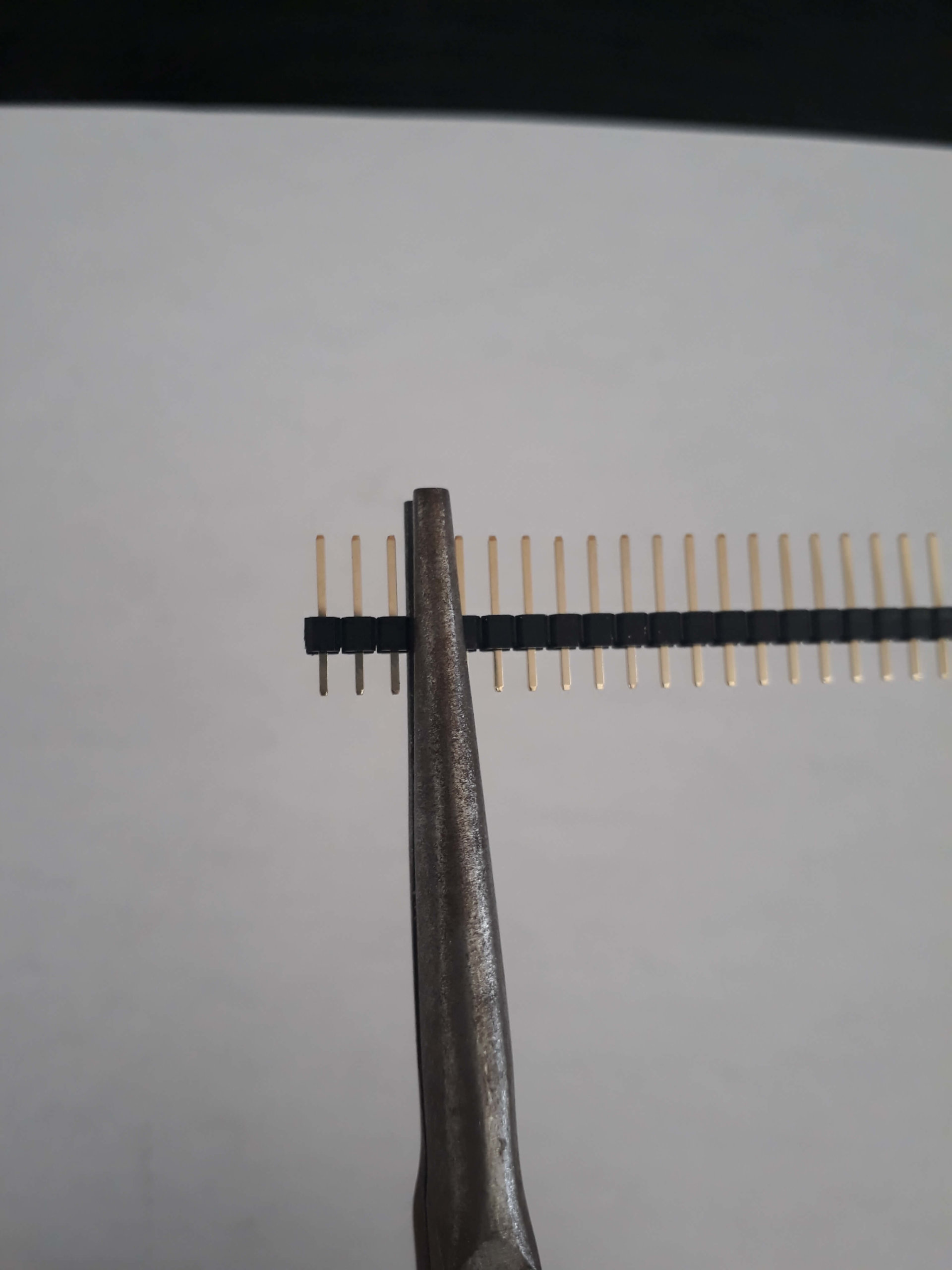
2. A barra de pinos


Com o alicate, separe os pinos da barra em grupos de três – um para cada servomotor ou sensor que pretende utilizar.
Solde os pinos na placa de ensaio, fazendo a parte mais curta atravessar para o lado da faixa de cobre.

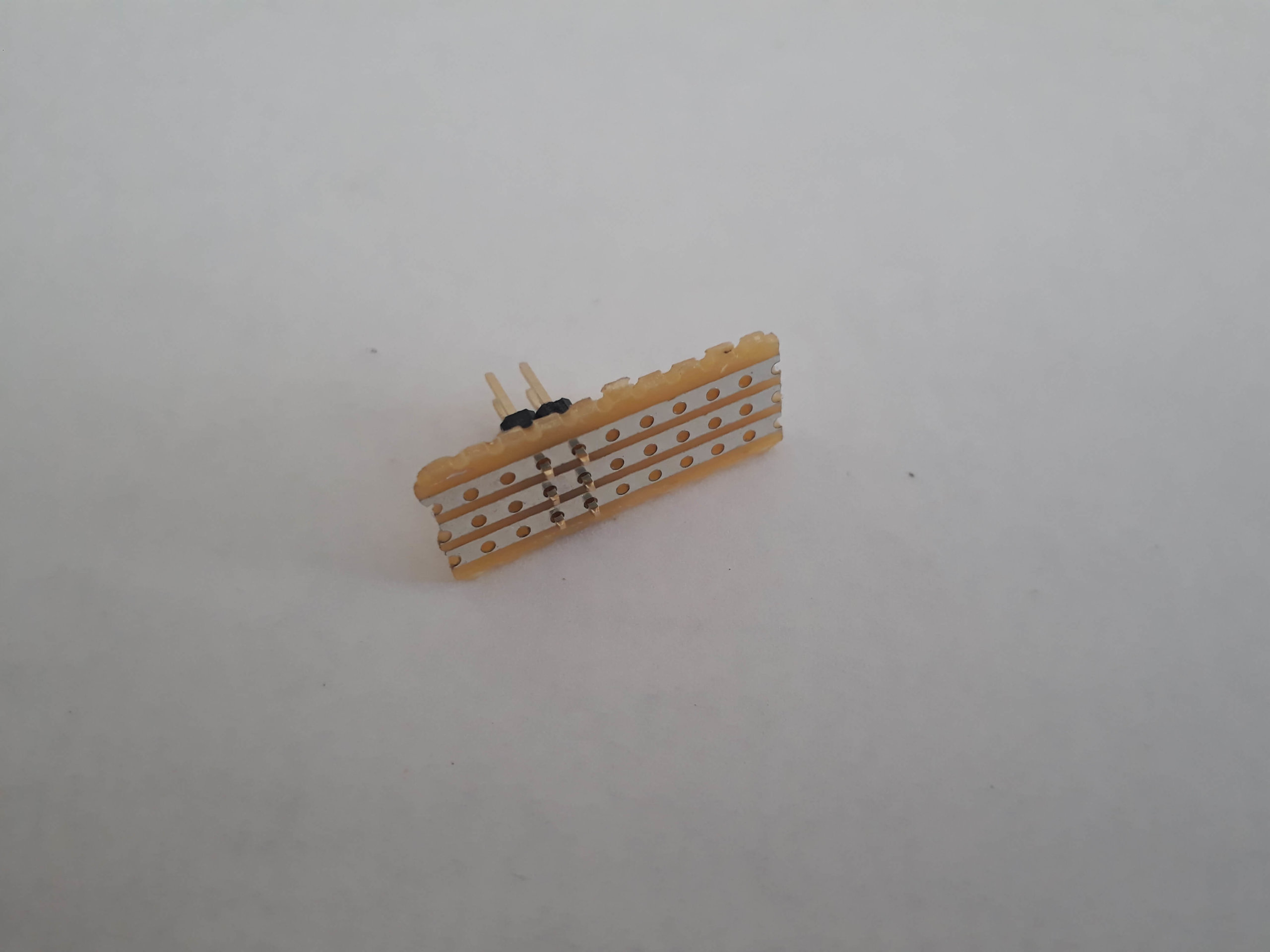

Quando terminar de soldar, verifique que as faixas estejam bem isoladas entre si.
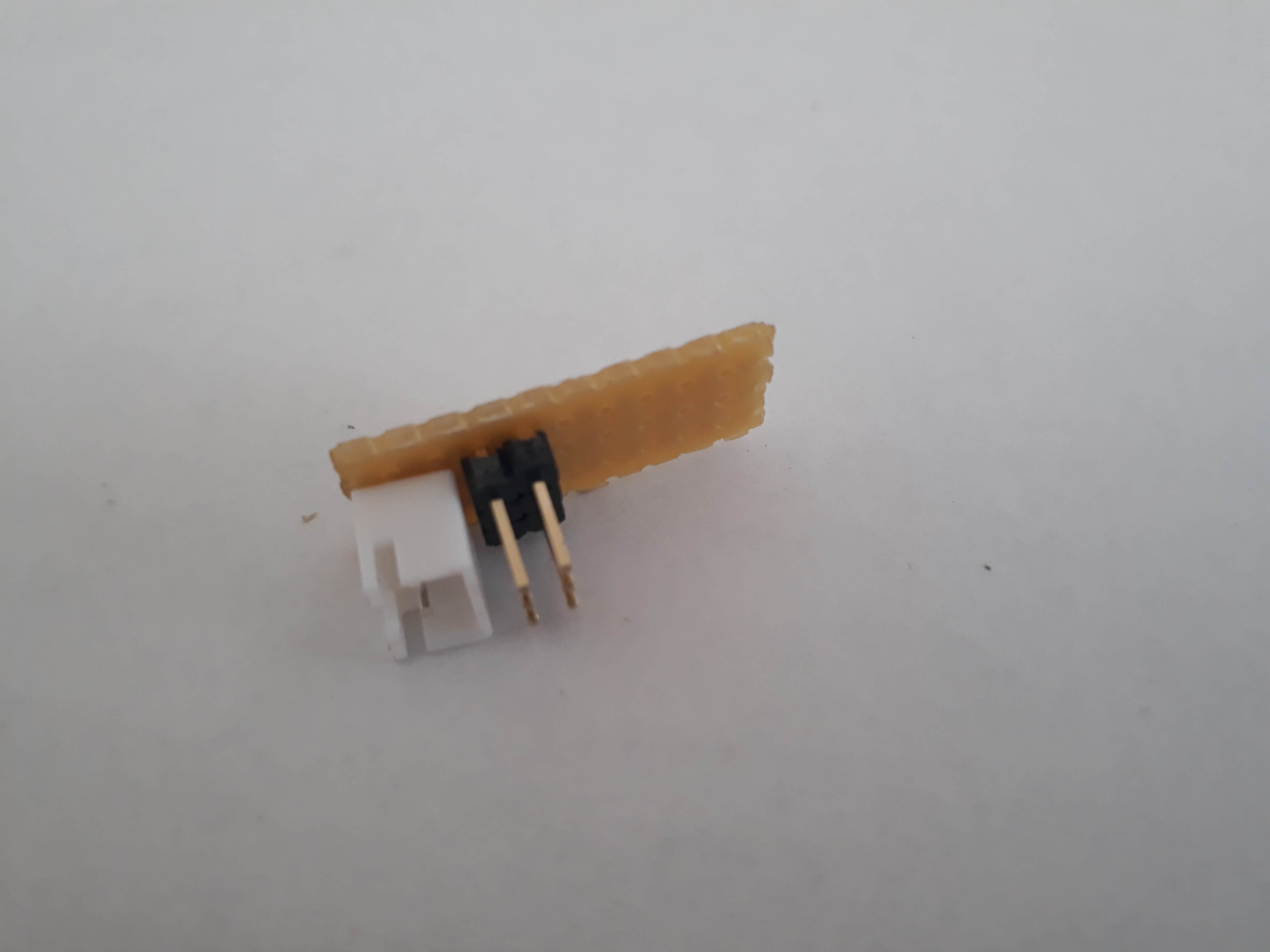
3. Conexão da bateria
Pode soldar os fios da bateria diretamente ou adicionar um conector que corresponda à fonte de alimentação utilizada, tendo o cuidado de integrar um interruptor se quiser poder desligar a bateria com facilidade. Para este projeto, utilizamos um conector JST.
4. Conexão da placa
Então, solde os fios para cada entrada PWM ou saída de sensor e solde a terra da placa Arduino na terra da placa de controle de servomotor.
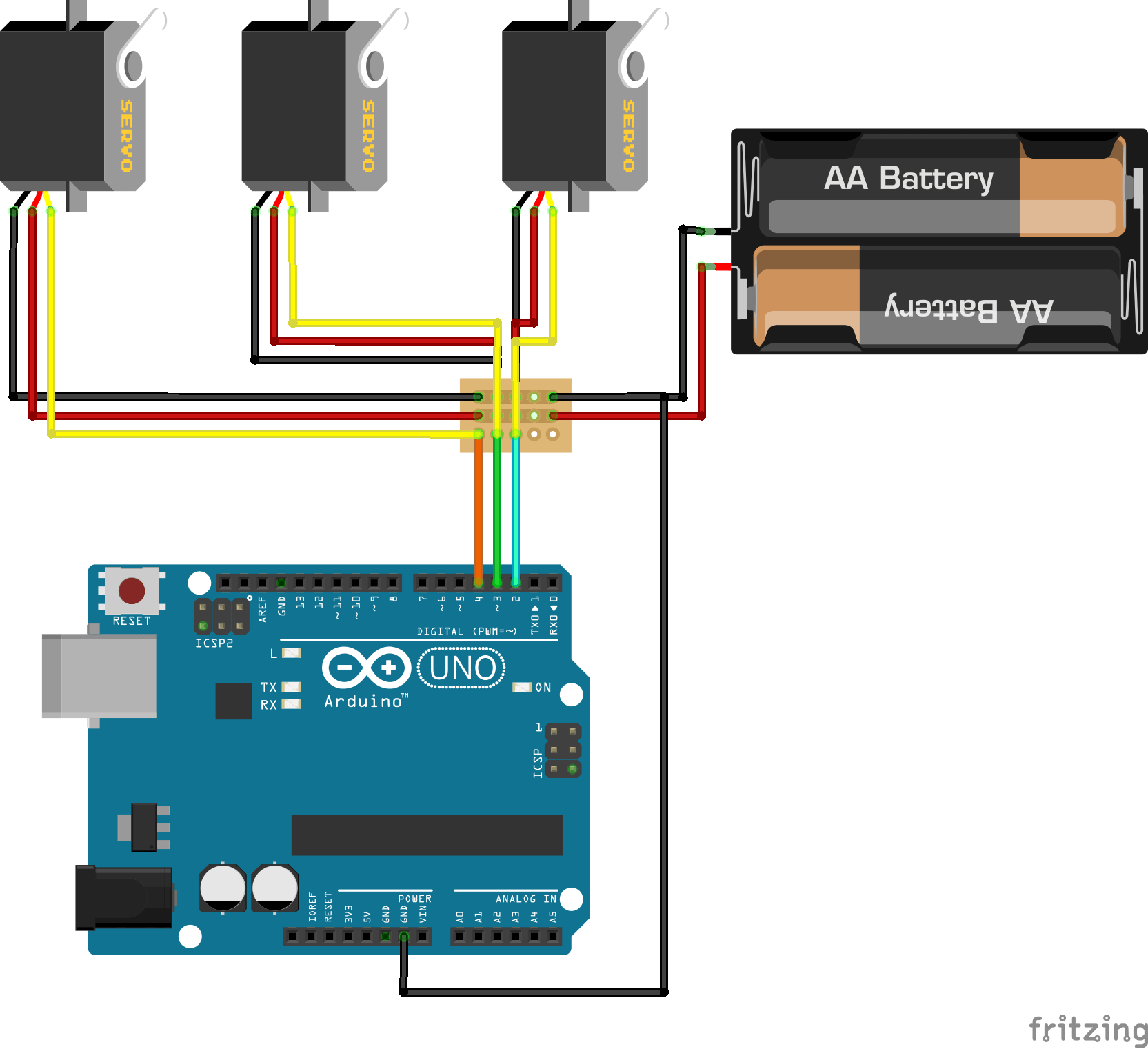
O seu driver de servomotor está pronto para ser usado.

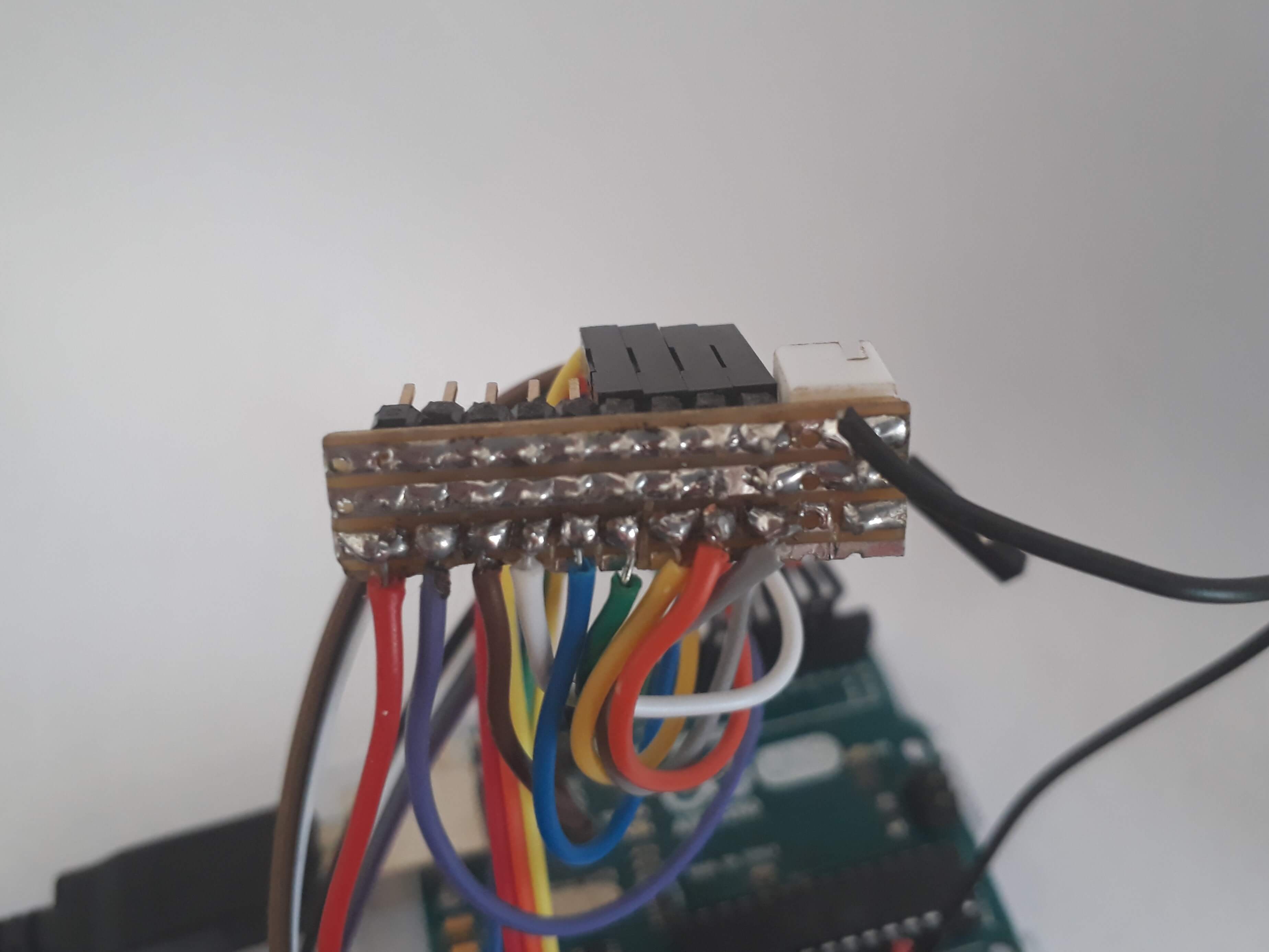
Resultado
Precauções
- Verifique a cablagem dos seus componentes.
- Desligue a bateria após o uso.
- Desligue a bateria se os servomotores vibrarem indesejadamente ou aquecerem de forma anormal.
- A saída de 5V do Arduino pode ser utilizada para no máximo um ou dois servomotores. Não tente controlar mais do que isso, pois pode danificar o seu Arduino.
- Não conecte o terminal de 5V da fonte de alimentação com o terminal de sinal do servomotor.
Conselhos
- Se quiser controlar muitos servomotores, pode adicionar um regulador de tensão.
- Para aprender a programar a sua placa Arduino para controlar os seus servomotores, veja este artigo.