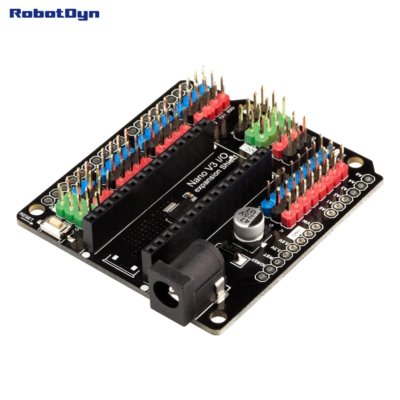
Le ServoHat est un shield pour Raspberry Pi qui est basé sur le contrôleur PCA9685. Le module PCA9685 est un contrôleur 16 canaux qui permet de piloter 16 sorties PWM via la communication I2C. Il permet entre autre de libérer des entrées sorties de votre microcontrôleur et piloter jusqu’à 16 LED ou servomoteurs (ou tout autre module prenant en entrée un signal PWM) à l’aide de deux broches (SCL et SDA) tout en conservant les broches de votre microcontrôleur pour d’autres modules comme des capteurs.
Matériel
- Ordinateur
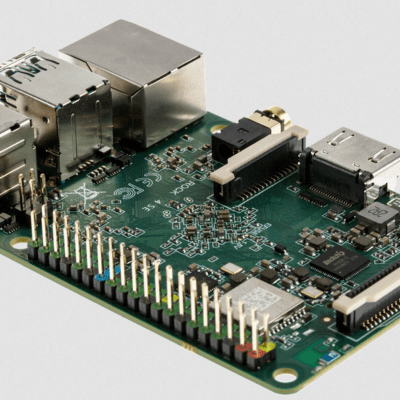
- Rapsberry Pi 3B+
- ServoHAT
Principe de fonctionnement
Le module est basé sur le contrôleur PCA9685 qui permet de piloter des sorties PWM à l’aide de la communication I2C et d’une horloge intégrée. Ce module comporte 6 ponts permettant de sélectionner l’adresse de la carte et ansi de placer sur le même bus jusqu’à 62 contrôleurs pour un total de 992 servomoteurs (Adresses disponibles 0x40 à 0x7F). Il permet de piloter des sorties PWM avec une fréquence ajustable et avec une résolution de 12 bits.
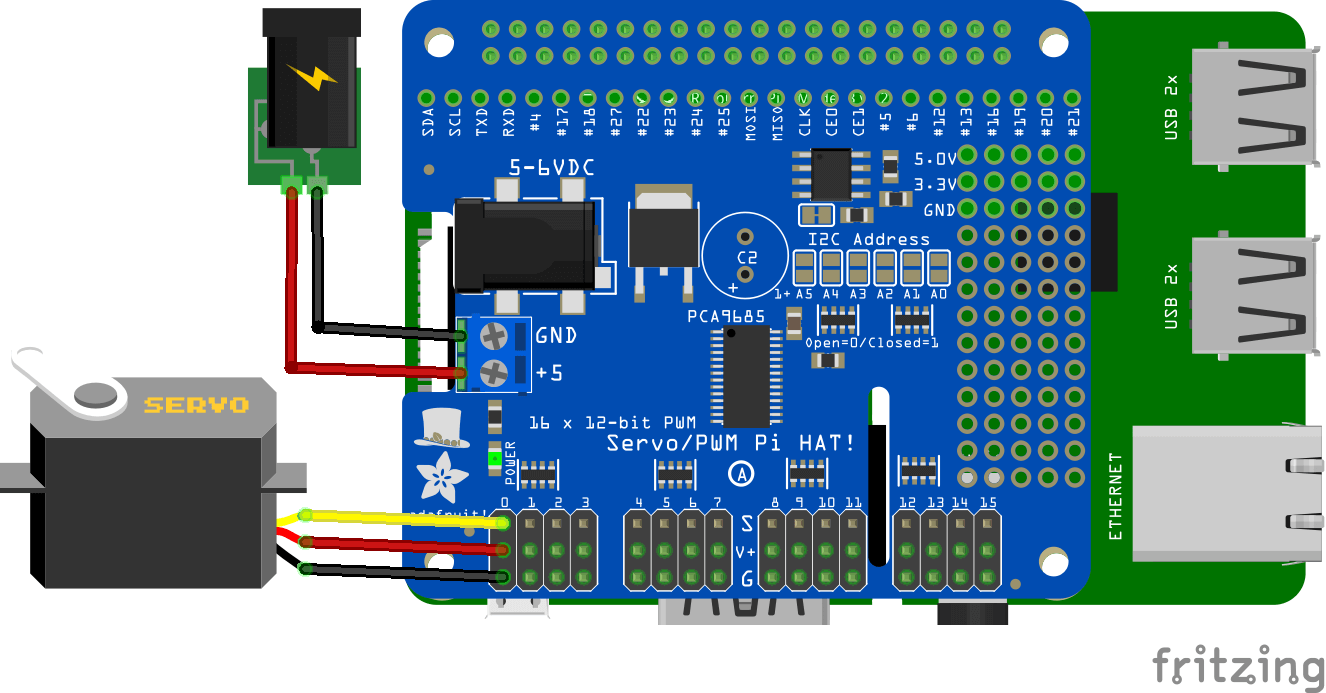
Schéma
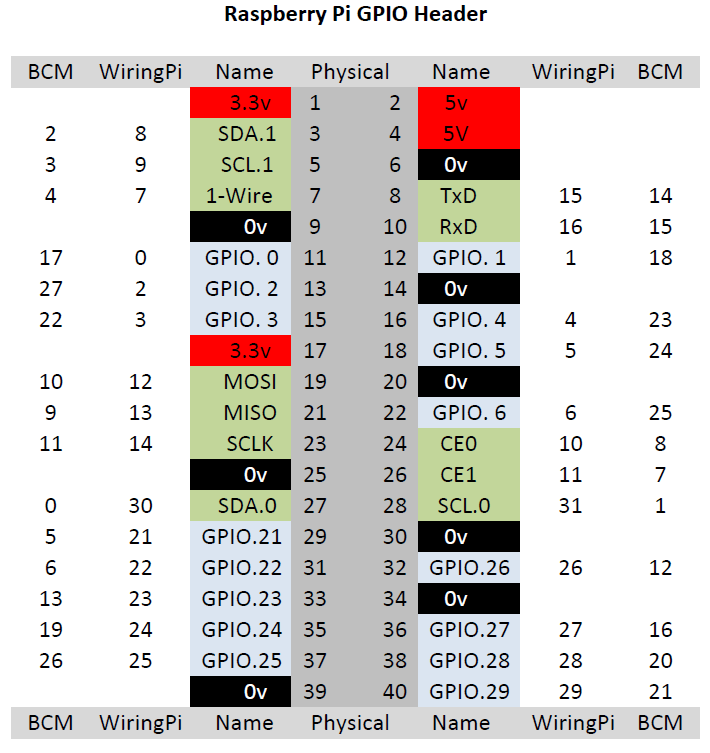
Le ServoHAT se place directement sur le connecteur du Raspberry Pi. Il est préférable d’utiliser des entretoises pour fixer le shield au microcontrôleur et ne pas abimer les broches du connecteurs. Le ServoHAT utilise le bus I2C du RaspberryPi soit les broche GPIO2 et 3 (SDA et SCL, respectivement).
Code
Le ServoHAT s’utilise de la même manière que le module PCA9685 avec la librairie adafruit_servokit.
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#Libraries
import time #https://docs.python.org/fr/3/library/time.html
from adafruit_servokit import ServoKit #https://circuitpython.readthedocs.io/projects/servokit/en/latest/
#Objects
pca = ServoKit(channels=16)
# function init
def init():
for i in range(nbPCAServo):
pca.servo[i].set_pulse_width_range(MIN_IMP[i] , MAX_IMP[i])
# function main
def main():
pcaScenario()
# function pcaScenario
def pcaScenario():
"""Scenario to test servo"""
for i in range(nbPCAServo):
for j in range(MIN_ANG[i],MAX_ANG[i],1):
print("Send angle {} to Servo {}".format(j,i))
pca.servo[i].angle = j
time.sleep(0.01)
for j in range(MAX_ANG[i],MIN_ANG[i],-1):
print("Send angle {} to Servo {}".format(j,i))
pca.servo[i].angle = j
time.sleep(0.01)
pca.servo[i].angle=None #disable channel
time.sleep(0.5)
if __name__ == '__main__':
init()
main()
Applications
- Piloter le robot Quadrina6
Sources
- http://adafruit.github.io/Adafruit-PWM-Servo-Driver-Library/html/class_adafruit___p_w_m_servo_driver.html#aa892432ed08e4b3892c8eb0478168dd8
- https://robojax.com/learn/arduino/robojax-PCA6985.pdf
- https://www.nxp.com/products/power-management/lighting-driver-and-controller-ics/ic-led-controllers/16-channel-12-bit-pwm-fm-plus-ic-bus-led-controller:PCA9685
- https://docs.python.org/fr/3/library/time.html
- https://circuitpython.readthedocs.io/projects/servokit/en/latest/