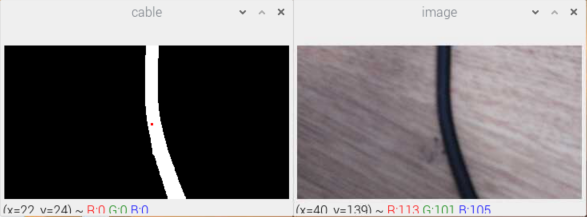

Développer un moniteur série avec Python
Lors de développement de projet avec Arduino, Raspberry Pi ou n’importe quel microcontrôleur vous serez certainement amené à créer une interface graphique comme, un moniteur série, pour la gestion du système (debugger, observer des mesure, lancer des actions,...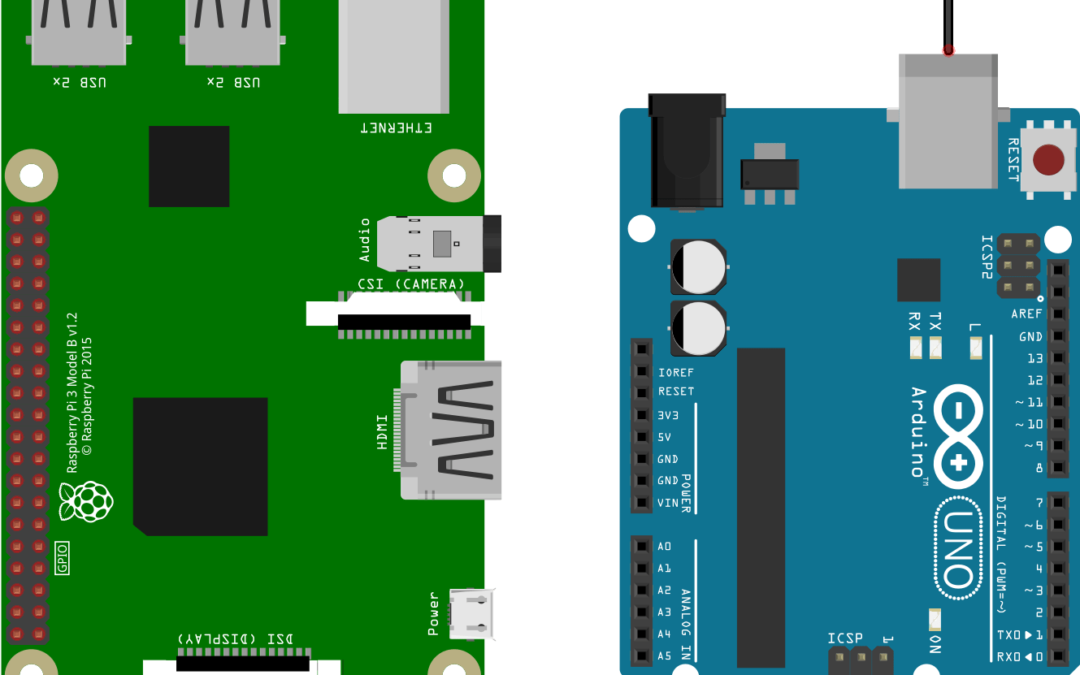
Communication série entre Raspberry Pi et Arduino
Dans certains projets, il peut être intéressant d’établir une communication série entre Raspberry Pi et Arduino. Il est ainsi possible de coupler la puissance de calcul et les interface sans fil du Raspberry Pi avec les entrées-sorties et la collection de...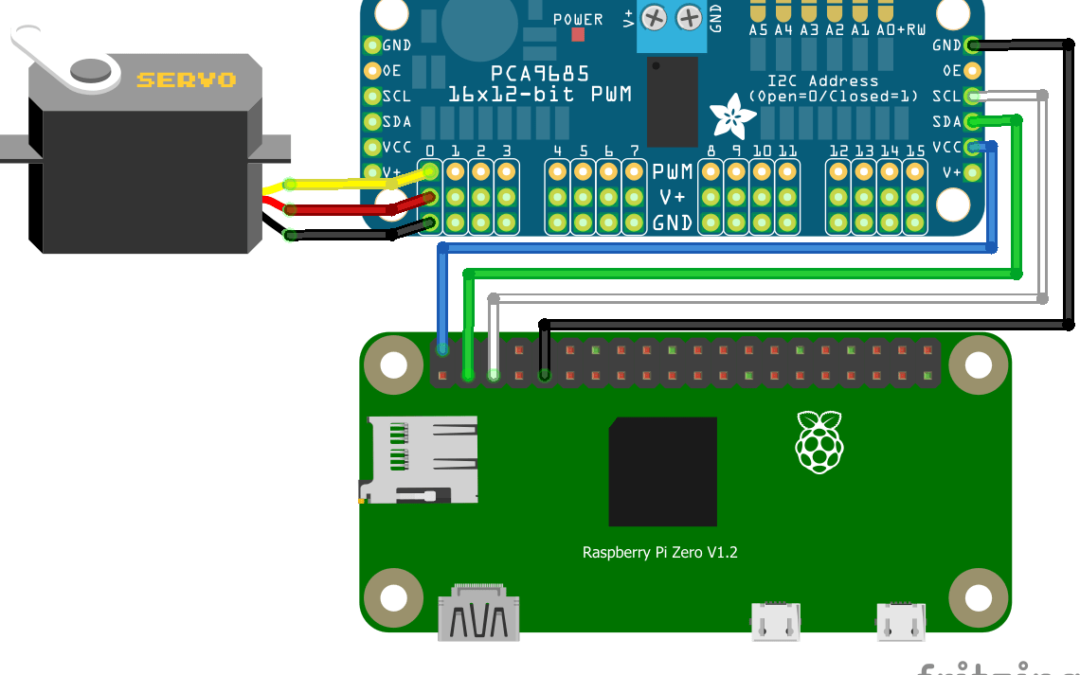
Utilisation d’un module PCA9685 avec Raspberry Pi
Le module PCA9685 est un contrôleur 16 canaux qui permet de piloter 16 sorties PWM via la communication I2C. Il permet entre autre de libérer des entrées sorties de votre microcontrôleur et piloter jusqu’à 16 LED ou servomoteurs (ou tout autre module prenant en...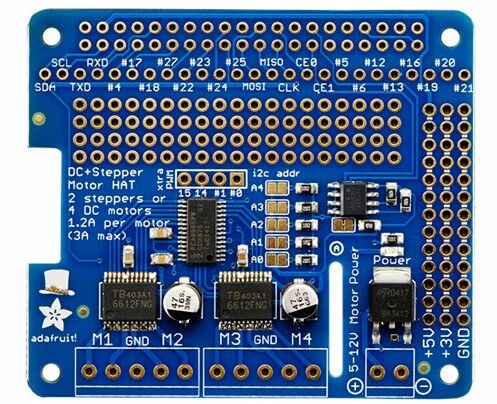
Pilotez plusieurs moteurs avec Raspberry Pi et le MotorHAT
Pour piloter un moteur, qu’il soit pas-à-pas ou à courant continu, avec un Raspberry Pi, il est nécessaire de rajouter un circuit intégré comme un pont en H. Pour simplifier les montages, il existe des shields comme pour Arduino, appelé HAT (chapeau) chez...Produits
-
 Robot en kit Quadrina pour Servomoteur MG90S
208,33€
Robot en kit Quadrina pour Servomoteur MG90S
208,33€
-
 Fichier STL QuadrinaV1
1,50€
Fichier STL QuadrinaV1
1,50€
-
 Boîtier pour microcontrôleur
Gratuit
Boîtier pour microcontrôleur
Gratuit
-
 NodeMCU ESP32 (ESP-WROOM-32)
9,17€
NodeMCU ESP32 (ESP-WROOM-32)
9,17€
-
 Support servomoteur horizontal
Gratuit
Support servomoteur horizontal
Gratuit
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license