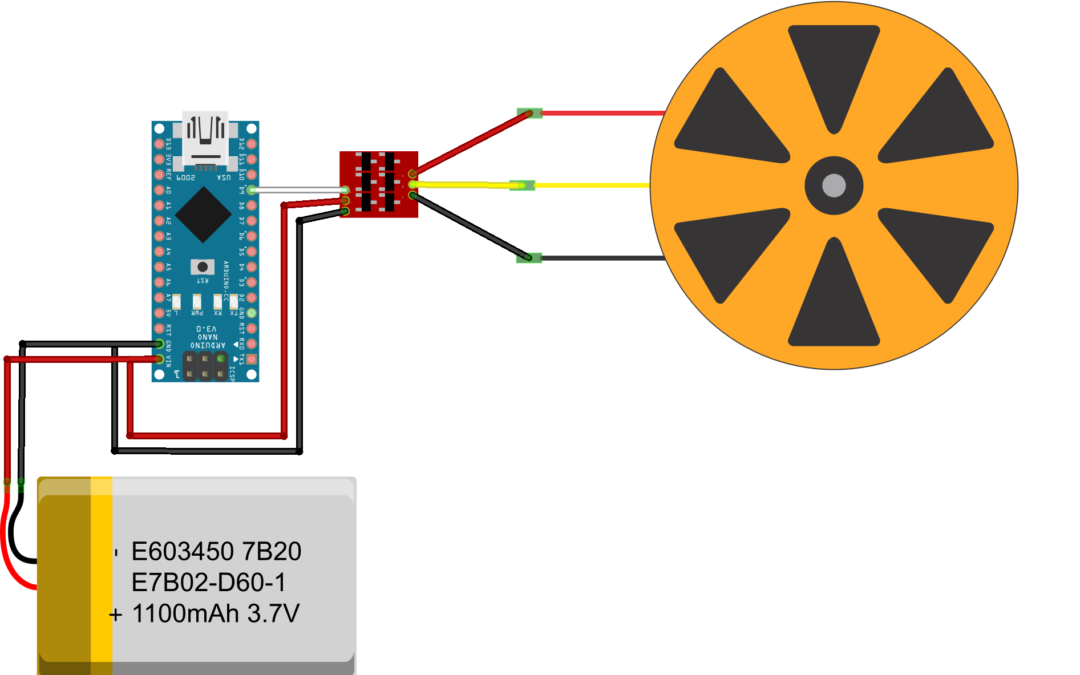
Pilotez un moteur brushless avec Arduino
L’un des objectifs principaux de la robotique est d’articuler des objets. Pour se faire, il est très courant d’utiliser des moteurs électriques. Dans le cas de robot volant, comme les drones les actionneurs ont besoin de vitesse de rotation important pour faire...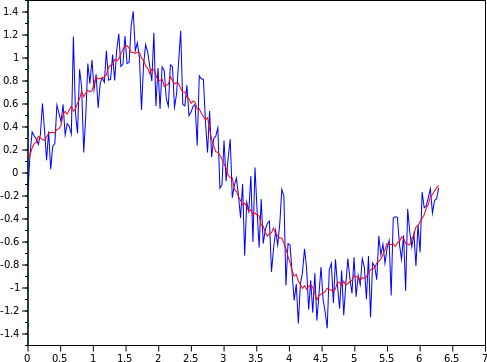
Implémentation de la moyenne glissante dans Arduino
Un capteur analogique envoie un niveau de tension, généralement compris entre 0 et 5V, représentant une valeur physique. Cette tension peut être sujet à des bruits de mesure (interférence électronique, électromagnétique, précision de mesure, etc.). Dans certaines...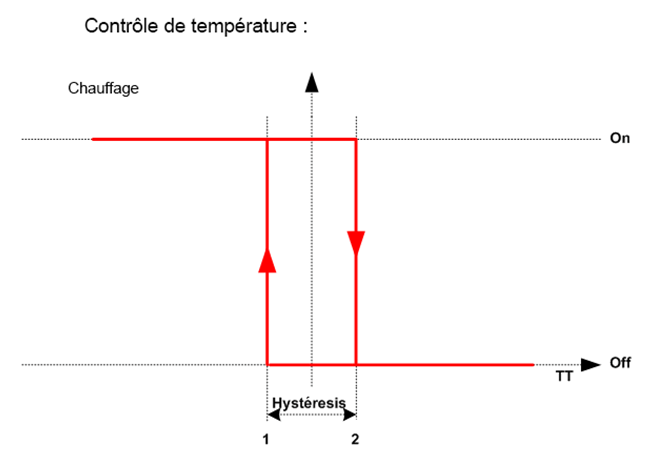
Implémentation d’un Hystérésis de mesure sur Arduino
Une capteur analogique envoie un niveau de tension, généralement comprise entre 0 et 5V, représentant une valeur physique. Cette tension peut être sujet à des bruits de mesure (interférence électronique, électromagnétique, précision de mesure, etc.). Dans certaines...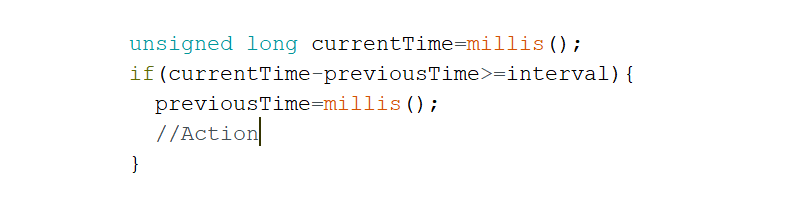
Utilisation de la fonction millis() de l’IDE Arduino
Pour pallier aux problèmes générés par l’utilisation de la fonction delay(), une solution possible est d’utiliser la fonction millis(). Dès la première utilisation de l’Arduino, la fonction delay() est utilisée afin de gérer les instructions en...Produits
-
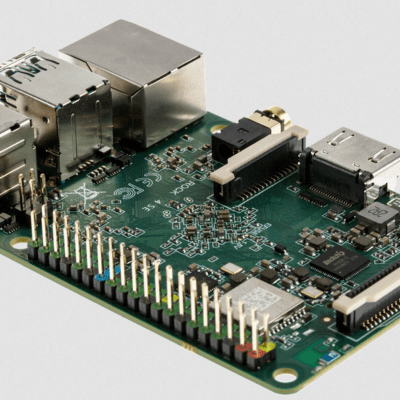 Ordinateur monocarte Rock Pi 4 SE 4 Go
85,00€
Ordinateur monocarte Rock Pi 4 SE 4 Go
85,00€
-
 Kit Arduino pour débutant
82,50€
Kit Arduino pour débutant
82,50€
-
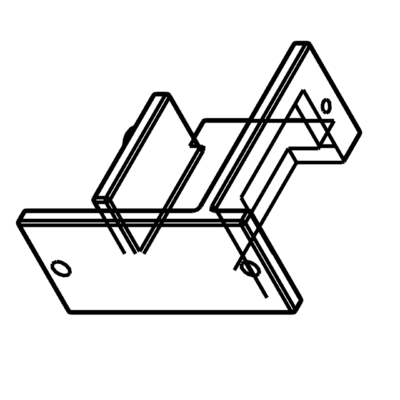 Support servomoteur vertical avec guide
Gratuit
Support servomoteur vertical avec guide
Gratuit
-
 Fichier STL Rovy
Gratuit
Fichier STL Rovy
Gratuit
-
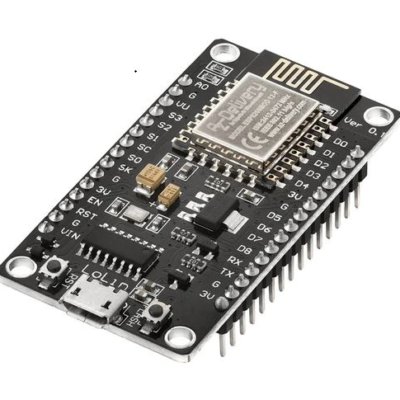 NodeMCU ESP8266 V3 (Lolin)
6,67€
NodeMCU ESP8266 V3 (Lolin)
6,67€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license