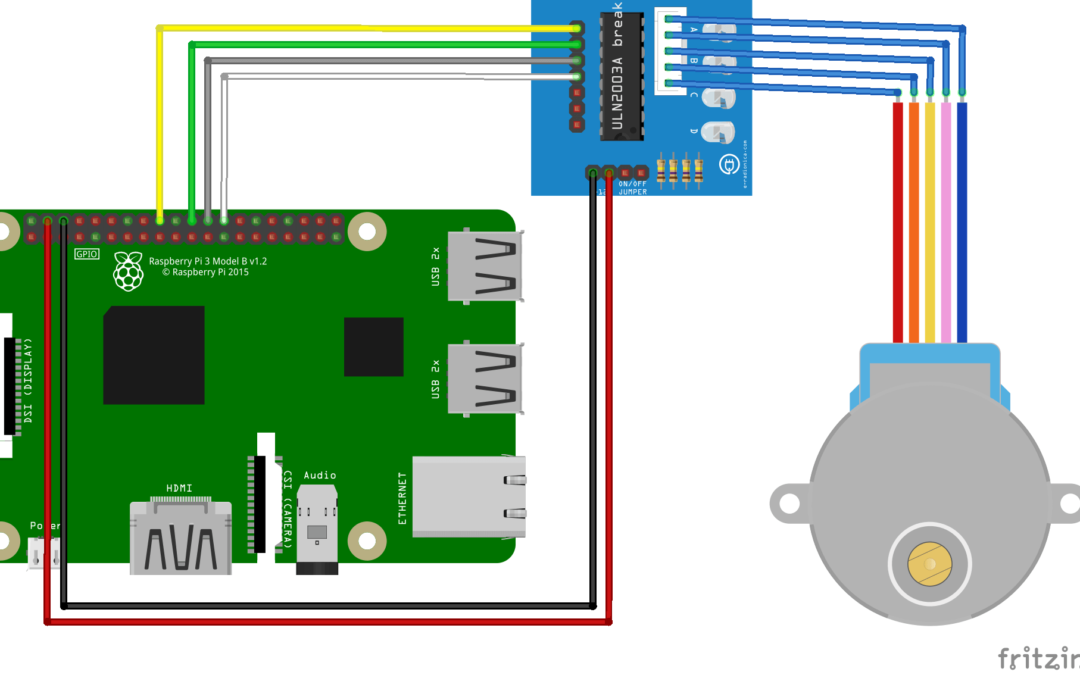
Pilotez un moteur pas-à-pas avec Raspberry Pi
Les moteurs pas-à-pas sont souvent utilisés lorsqu’une bonne précision est désirée en boucle ouverte notamment dans les systèmes de positionnement tels que les imprimantes 3D. Nous allons voir, dans cet article, comment programmer la carte Raspberry Pi pour...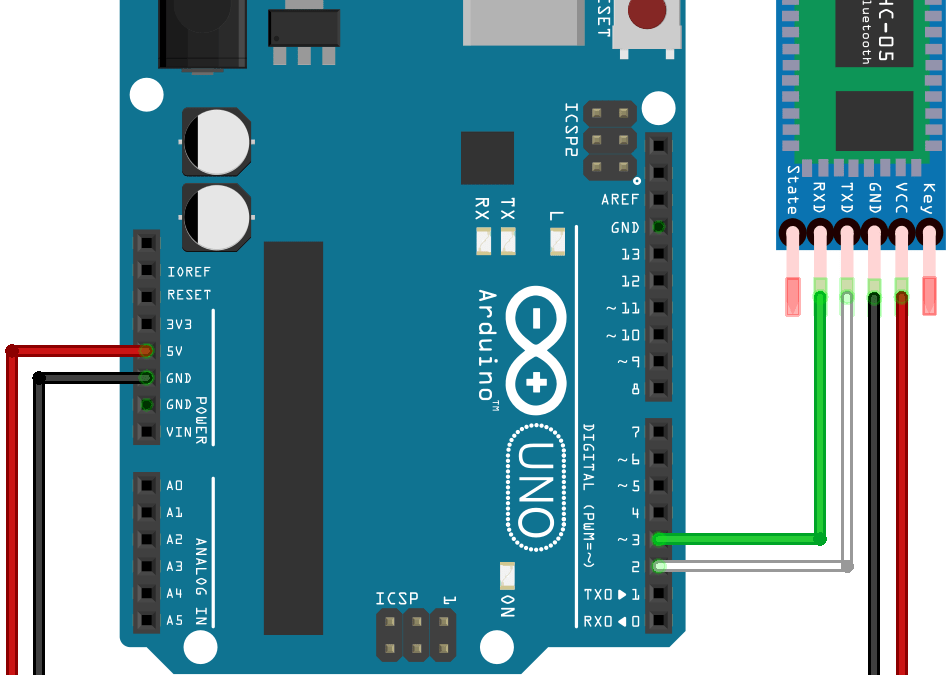
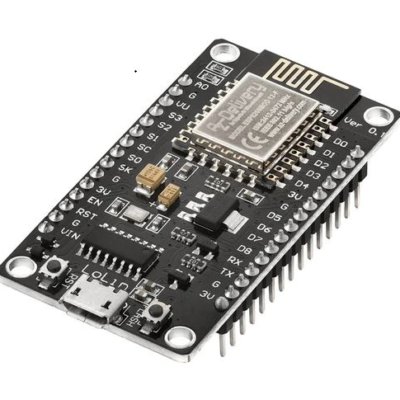
Votre Arduino communique avec le module HC-05
Votre carte Arduino peut communiquer avec d’autres appareils(Smartphone, ordinateur ou un autres microcontrôleurs) par liaison Bluetooth en utilisant un module HC-05 (maître/esclave). Cela vous permet de connecter la carte Arduino à un autre système afin...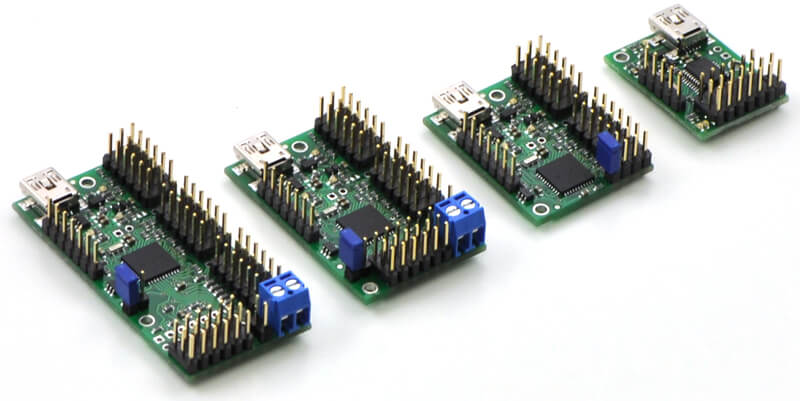
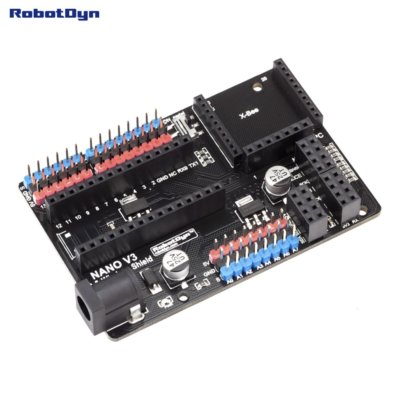
Pilotez un contrôleur série Maestro avec Arduino
Lorsque vous voulez piloter plusieurs servomoteurs et que vous avez besoin de beaucoup d’entrées/sorties disponibles pour faire fonctionner votre robot (pour piloter Hexana, par exemple), il est plus pratique d’utiliser un contrôleur série de servomoteur...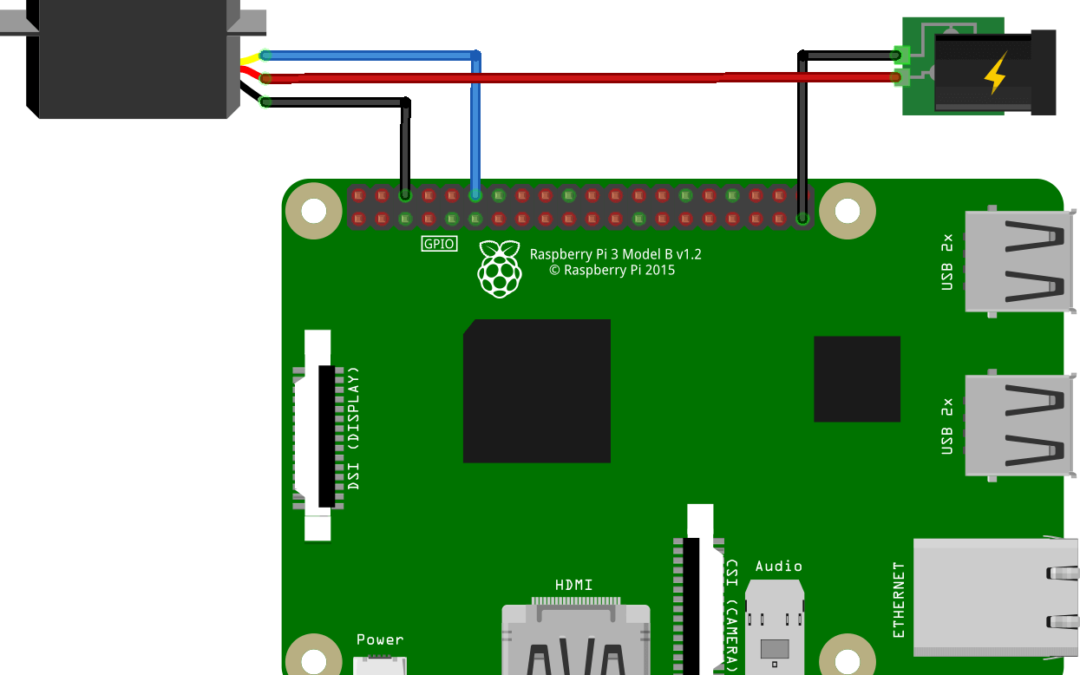
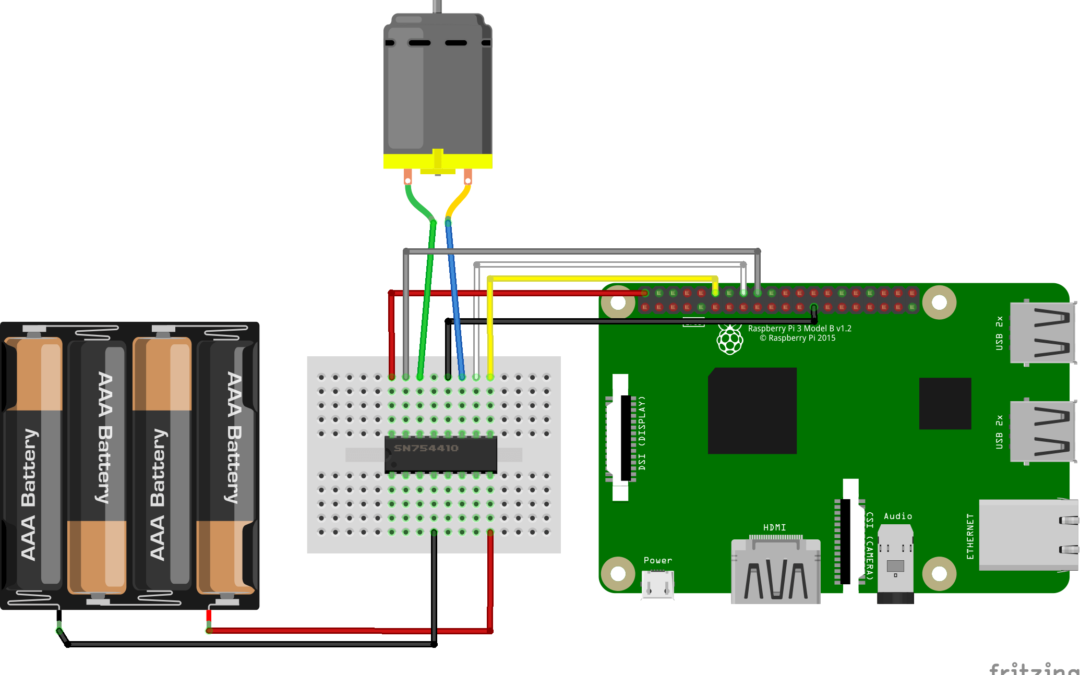
Pilotez un servomoteur avec Raspberry Pi
L’un des objectifs principaux de la robotique est d’articuler des objets. Pour se faire, il est très courant d’utiliser des moteurs électriques et plus particulièrement des servomoteurs. Nous allons voir dans cet article, comment programmer la carte Raspberry Pi...Produits


Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license