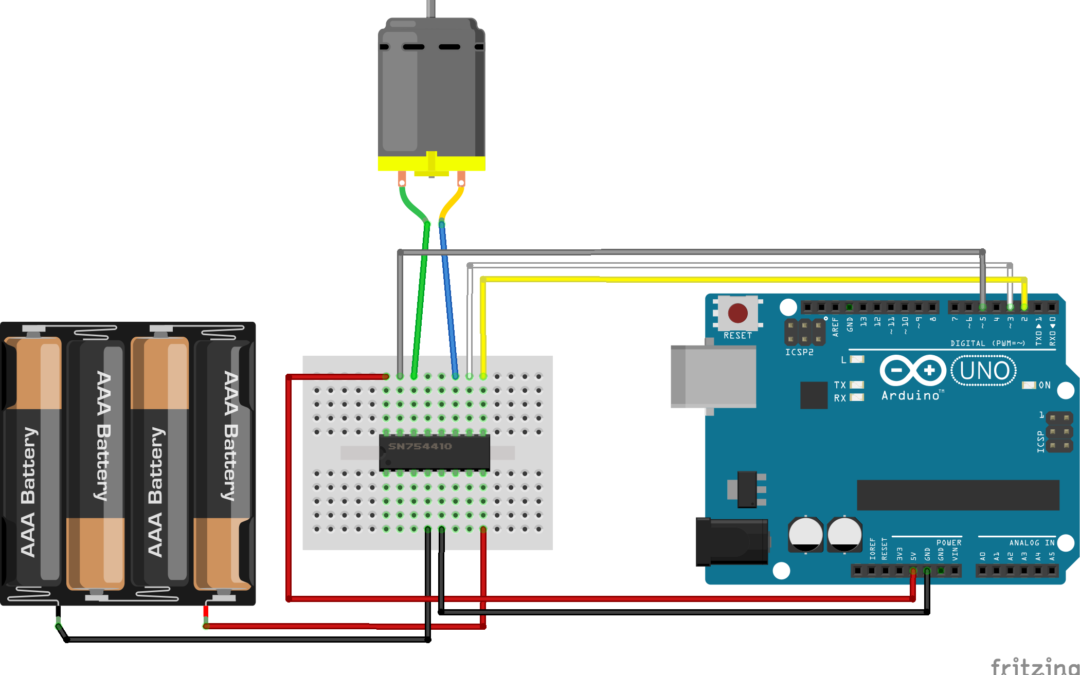
Pilotez un moteur CC avec Arduino
L’un des objectifs principaux de la robotique est d’articuler des objets. Pour se faire, il est très courant d’utiliser des moteurs électriques comme des moteurs à courant continu notamment pour les plateformes mobiles. Dans cet article, nous verrons comment...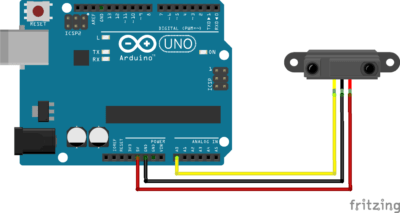
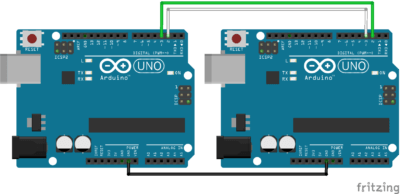
Donnez des sens à votre robot avec des capteurs
Un robot est constitué de quatre composantes principales: les moteurs pour le faire bouger, la mécanique pour sa structure, les capteurs pour le faire réagir à son environnement et le programme pour relier et gérer ces composants et, ainsi, créer la fonctionnalité...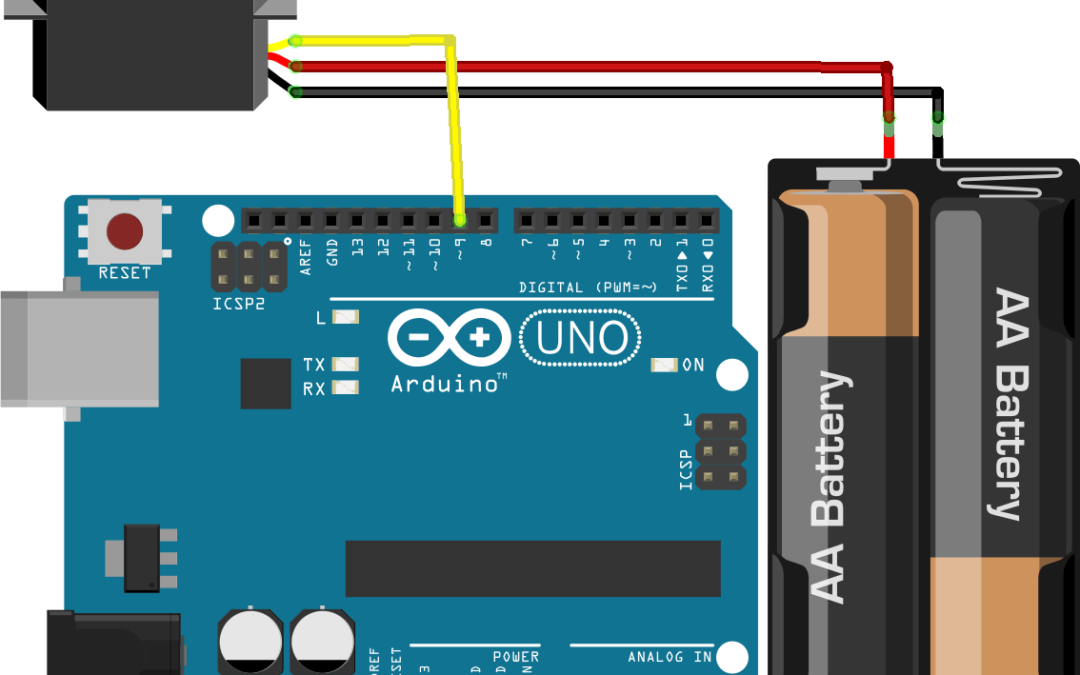
Pilotez un servo avec Arduino
L’un des objectifs principaux de la robotique est d’articuler des objets. Pour se faire, il est très courant d’utiliser des moteurs électriques et plus particulièrement des servomoteurs. Nous allons voir dans cet article, commet programmer la carte Arduino pour...
Un robot qui dessine
Le projet présenté ici consiste à faire dessiner un bras robotisé muni d’un crayon sur une feuille de papier. Un très bon exercice pour programmer et piloter correctement un bras robotisé. Matériel Bras robotisé Handy 4x Servomoteur SMS1012 Driver de...Produits
-
 Support servomoteur lateral
Gratuit
Support servomoteur lateral
Gratuit
-
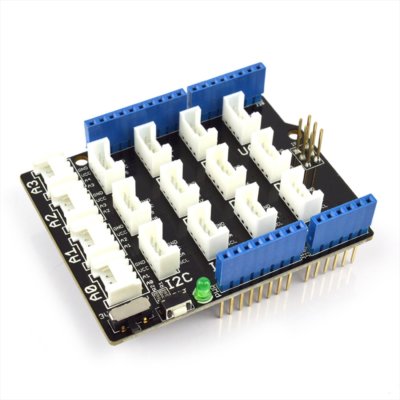 Grove I/O Base Shield
5,33€
Grove I/O Base Shield
5,33€
-
 Coque pour capteur
Gratuit
Coque pour capteur
Gratuit
-
 Support servomoteur vertical avec guide
Gratuit
Support servomoteur vertical avec guide
Gratuit
-
 AC DevShield ESP32
20,83€
AC DevShield ESP32
20,83€
Licence
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license