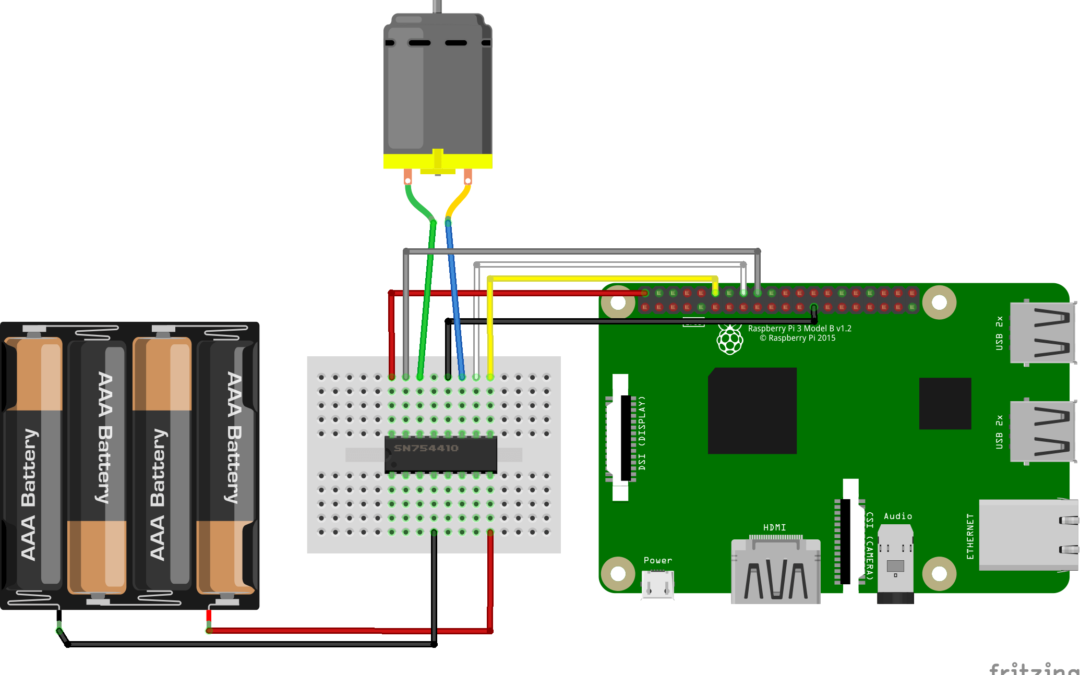
Controle un motor CC con Raspberry Pi
Uno de los principales objetivos en robótica es hacer que las cosas se muevan por sí mismas. Para dar movimiento a un robot, a menudo se utilizan motores eléctricos, como los motores de corriente continua (CC), especialmente para robots móviles. En este tutorial,...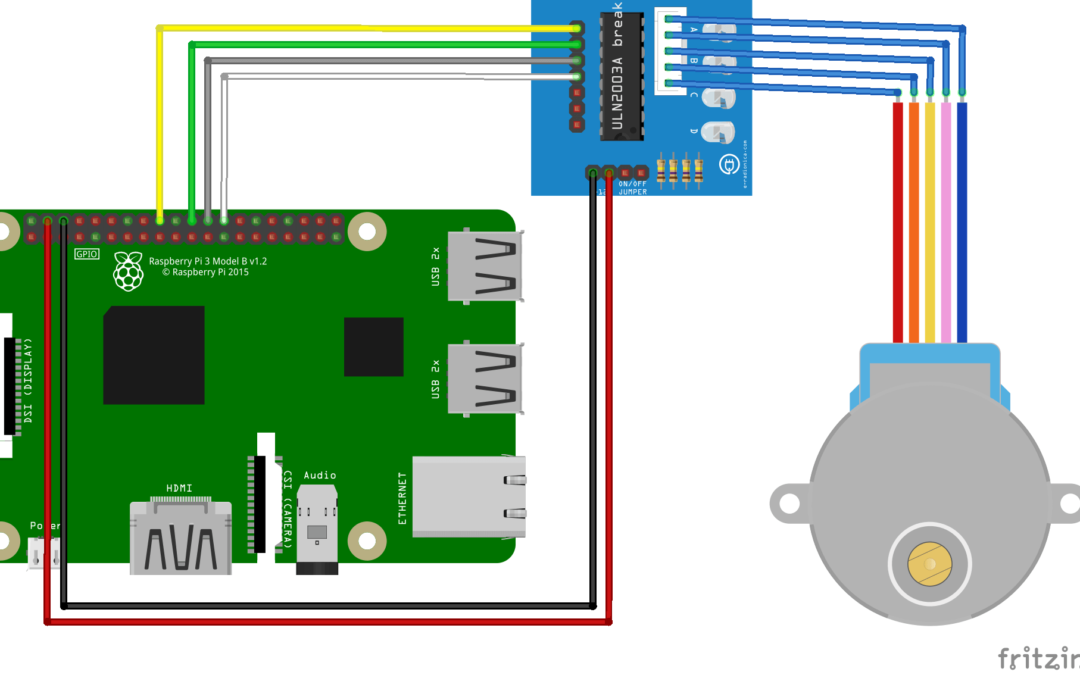
Controla un stepper con RaspberryPi
Los steppers se usan cuando se requiere alta precisión con el control de bucle abierto. Veremos cómo programar su Raspberry Pi para controlar un motor paso a paso. Prerequisite: Programación con Raspberry Pi Material Pantallacable HDMITecladoRaspberry PI 3 (con...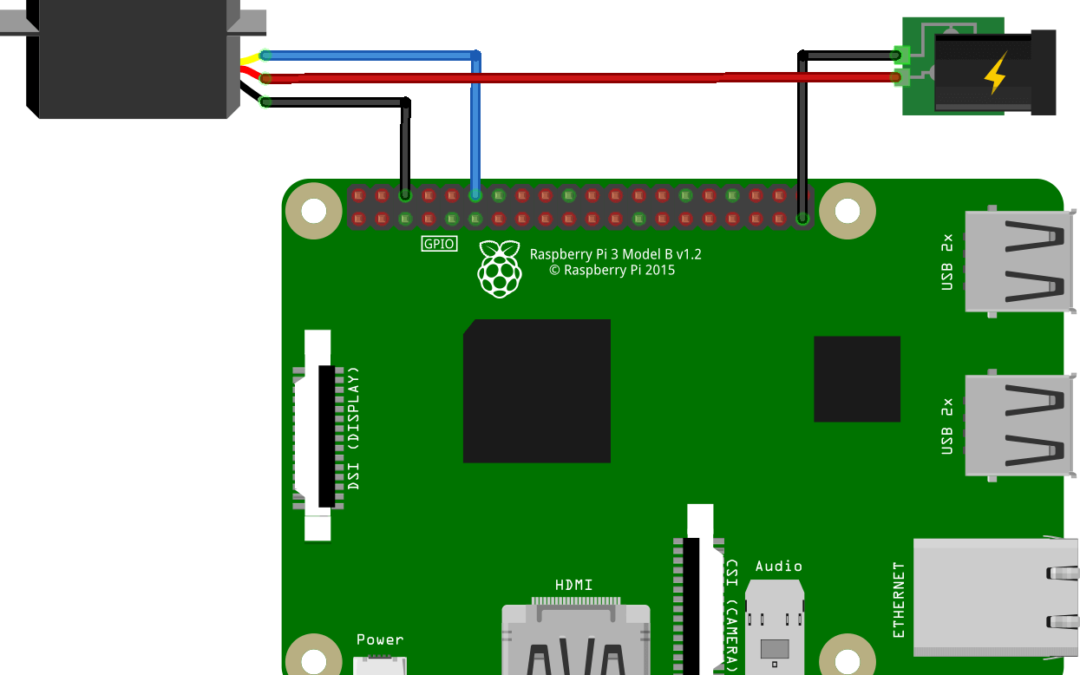
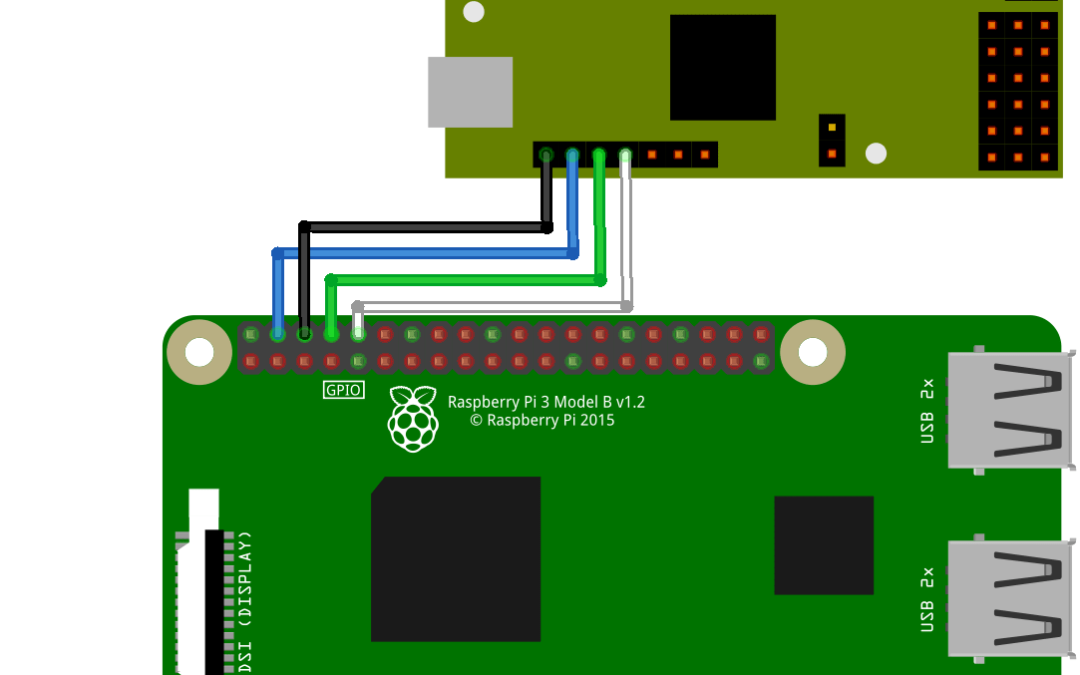
Controla un servomotor con Raspberry Pi
Uno de los principales objetivos en robótica es hacer que las cosas se muevan. Una forma de hacerlo es usar servomotores. En este tutorial, veremos cómo programar su Raspberry Pi para controlar dicho dispositivo. Prerrequisito : Programación con Raspberry Pi Material...Programe su Raspberry Pi con C/C++
Los recursos para Raspberry PI generalmente se escriben para Python pero, como microcomputadora, se pueden usar otros idiomas. Si conoces C / C ++ (si vienes del mundo de Arduino, por ejemplo) y no quieres molestarte en aprender otro lenguaje informático, es posible...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license