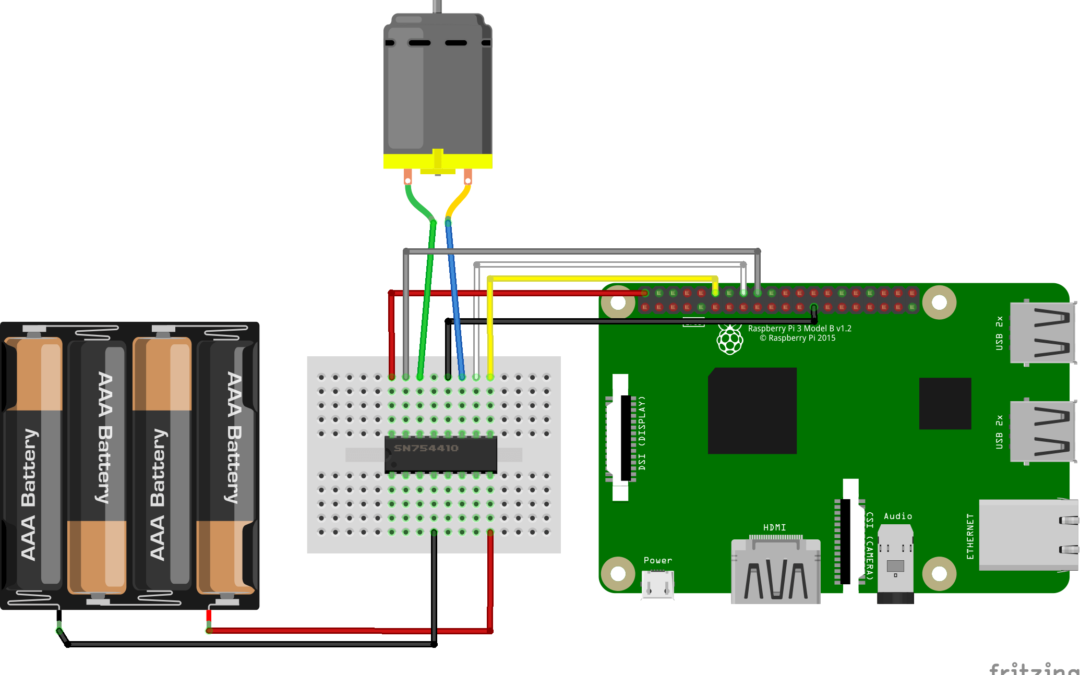
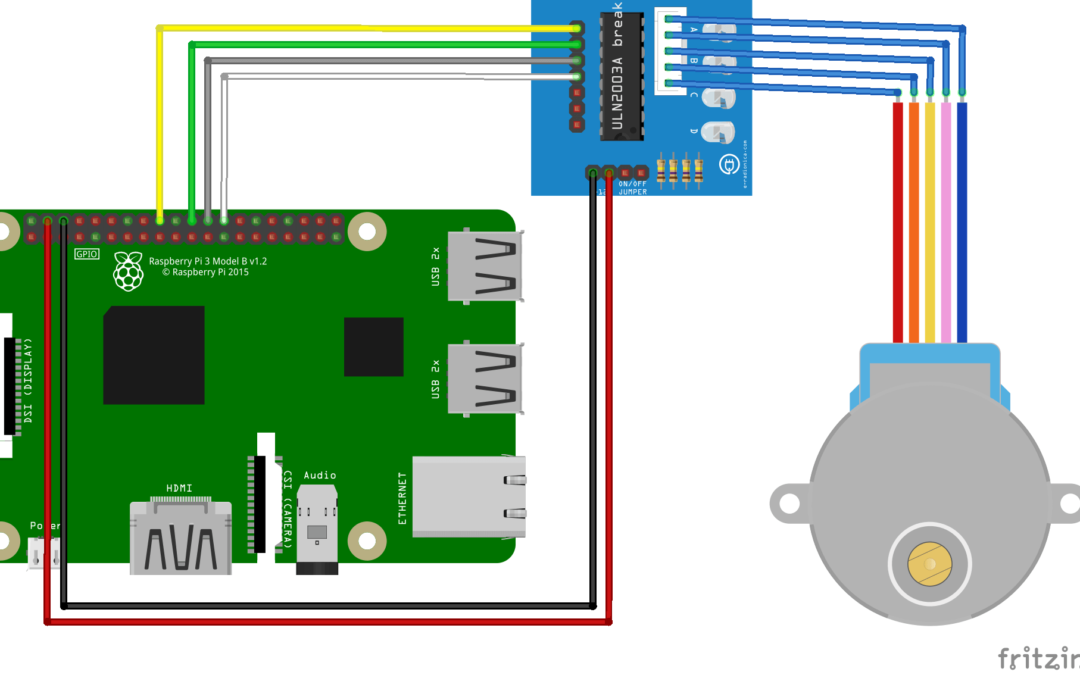
Controla un stepper con RaspberryPi
Los steppers se usan cuando se requiere alta precisión con el control de bucle abierto. Veremos cómo programar su Raspberry Pi para controlar un motor paso a paso. Prerequisite: Programación con Raspberry Pi Material Pantallacable HDMITecladoRaspberry PI 3 (con...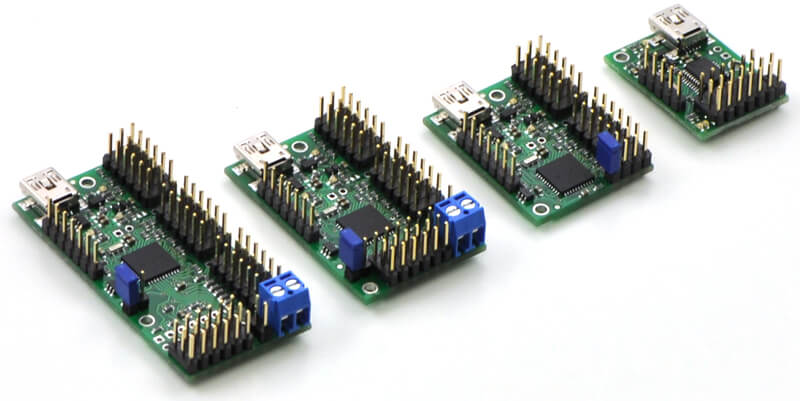
Comando un controlador serie Maestro con Arduino
Cuando se trata con varios servomotores y se necesita un número adicional de salidas para operar su robot (para controlar Hexana, por ejemplo), una solución práctica es usar un controlador en serie como el Mini Maestro de Pololu. Requisito previo: Programming with...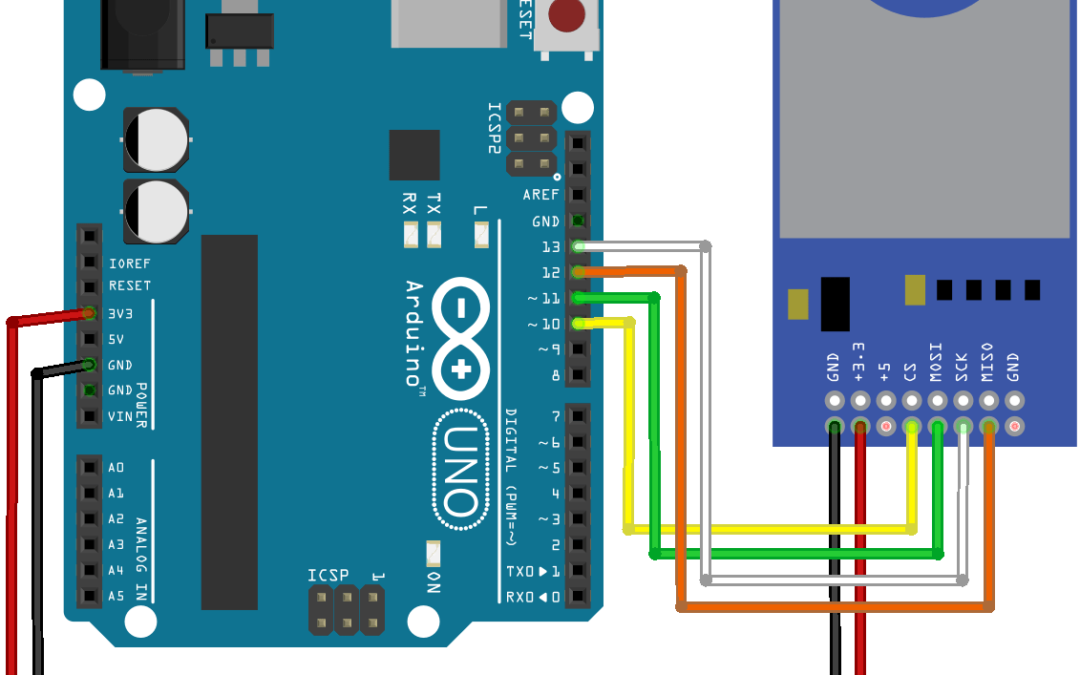
Leer y escribir en una tarjeta SD con Arduino
Uno de los puntos débiles del Arduino es el espacio de memoria. Al jugar con datos (guardar mediciones, leer o escribir en un archivo, etc.), es necesario tener mucho espacio disponible. Puede agregar fácilmente memoria al Arduino con una tarjeta Secure Digital o una...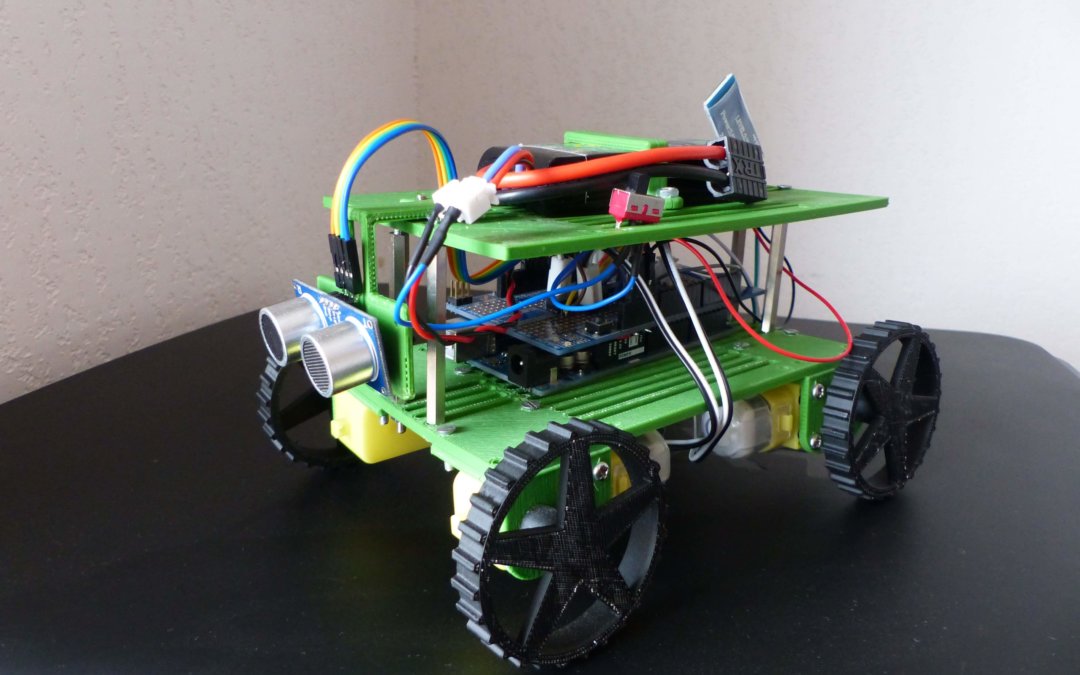
Un robot que detecta y evita obstáculos.
Una vez que su robot está montado y la electrónica funciona correctamente, es hora de darle su funcionalidad. Las características son «¿Quién soy yo?» «Y» ¿Por qué estoy en esta Tierra? De un robot Tantas preguntas existenciales que solo tú puedes responder. En el...Productos
-
 Kit de robot Quadrina Servo MG90S
208,33€
Kit de robot Quadrina Servo MG90S
208,33€
-
 Archivo STL QuadrinaV1
1,50€
Archivo STL QuadrinaV1
1,50€
-
 Kit de robot Rovy para DC Motor TTGM
137,50€
Kit de robot Rovy para DC Motor TTGM
137,50€
-
 Kit de robot WillySR Servo FS90R
100,00€
Kit de robot WillySR Servo FS90R
100,00€
Licencia
![]()
Files are licensed under the Creative Commons – Attribution – Non-Commercial license