En este tutorial, veremos cómo crear y ejecutar scripts Python bajo ROS2. Esto te permitirá crear tus propios nodos y empezar a desarrollar bajo ROS.
Crear un espacio de trabajo
Una buena práctica para desarrollar bajo ROS2 es crear espacios de trabajo en los que instalar los paquetes deseados, separados de la instalación principal.
Instalación Colcon
sudo apt install python3-colcon-common-extensions
Crear carpeta
mkdir -p ~/tuto_ws/src cd ~/tuto_ws
A continuación, copie un proyecto de ejemplo, como el tutorial que contiene turtlesim
git clone https://github.com/ros/ros_tutorials.git -b iron
A continuación, compile el proyecto mediante el comando
colcon build
Para cargar su espacio de trabajo en un nuevo terminal
source /opt/ros/iron/setup.bash cd ~/ros2_ws source install/local_setup.bash
N.B.: puede poner los siguientes comandos en un ros_profile para la fuente en un solo comando «source ros_profile»
Creación de un paquete python
ROS2 ofrece una sencilla herramienta para crear la arquitectura de ficheros de un paquete Python o C++. Debe especificar al menos el nombre del paquete (mi_paquete). También puede dar el nombre del nodo.
En el directorio ~/ros2_sw/src, introduzca el siguiente comando
ros2 pkg create --build-type ament_python --license Apache-2.0 --node-name my_node my_package --license Apache-2.0
el script python está ahora en el directorio ~/ros2_ws/src/my_package/my_package
Una vez creado el paquete, puede añadir tantos nodos como desee a esta carpeta.
Tendrás que actualizar los archivos setup.py y package.xml con las dependencias y puntos de entrada
Instalación de dependencias
Antes de compilar el proyecto, es aconsejable resolver las dependencias.
rosdep install -i --from-path src --rosdistro iron -y
Compilar el proyecto
Puede compilar todo el proyecto o seleccionar un paquete concreto
colcon build --packages_select my_package --symlink-install
N.B.: symlink-install significa que no tienes que recompilar cada vez que cambias el script Python.
Lanzar el nudo
Una vez compilado el paquete, puede lanzar el nodo con el comando
ros2 run my_package my_node
El código básico al crear un nodo
def main():
print('Hi from my_package.')
if __name__ == '__main__':
main()
Cuando se ejecute, este código simplemente mostrará el texto de la impresión
Creación de un editor y un suscriptor para Turtlesim
En este ejemplo, veremos cómo crear un paquete con dos nodos, uno controlando la tortuga y el otro leyendo la posición.
Creación de paquetes
ros2 pkg create --build-type ament_python --license Apache-2.0 --node-name projects control_turtle --license Apache-2.0
He aquí la arquitectura de archivos deseada
.
├── LICENSE
├── package.xml
├── projects
│ ├── control_turtle.py
│ └── read_turtle.py
├── setup.cfg
└── setup.pyAñadir scripts Python
- Editor control_turtle.py
Importamos el tipo de mensaje a publicar Twist para controlar la velocidad de la tortuga
Nos conectamos al tema especificando el nombre (‘/turtle1/cmd_vel’) y el tipo de datos (Twist)
Creamos un temporizador que nos permitirá publicar regularmente sobre el tema (create_timer)
Por último, publicamos la línea y la velocidad angular
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# control_turtle.py
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
import os
# Node should have the same name as the node file
nodename= os.path.splitext(os.path.basename(__file__))[0]
class TurtleController(Node):
def __init__(self):
super().__init__(nodename)
self.get_logger().info(nodename+" started")
self.publisher_ = self.create_publisher(
Twist,
'/turtle1/cmd_vel',
10)
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
#msg = String()
#msg.data = 'Hello World: %d' % self.i
msg = Twist()
msg.linear.x = 1.0
msg.angular.z = 0.5
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg)
self.i += 1
def main(args=None):
rclpy.init(args=args)
turtle_controller = TurtleController()
try:
rclpy.spin(turtle_controller)
turtle_controller.destroy_node()
rclpy.shutdown()
except:
turtle_controller.get_logger().info(nodename+" stopped")
if __name__ == '__main__':
main()
- Suscriptor read_turtle.py
Importar el tipo de mensaje a publicar Pose
Nos conectamos al tema especificando el nombre (‘/turtle1/pose’) y el tipo de datos (Pose)
Escribimos la función de escucha que se ejecuta cuando hay nuevos datos disponibles sobre el tema
Creamos un temporizador que nos permitirá visualizar los valores a la frecuencia deseada
Por último, publicamos la línea y la velocidad angular
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# control_turtle.py
import rclpy #rospy
from rclpy.node import Node
from turtlesim.msg import Pose
import os
# Node should have the same name as the node file
nodename= os.path.splitext(os.path.basename(__file__))[0]
class TurtleReader(Node):
def __init__(self):
super().__init__(nodename)
self.get_logger().info(nodename+" started")
self.subscription = self.create_subscription(
Pose,
'/turtle1/pose',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
self.timer = self.create_timer(2, self.timer_callback)
self.msg = None
def listener_callback(self, msg):
self.msg = msg
def timer_callback(self):
self.get_logger().info("I read %s" % self.msg )
def main(args=None):
rclpy.init(args=args)
turtle_reader = TurtleReader()
try:
rclpy.spin(turtle_reader)
turtle_reader.destroy_node()
rclpy.shutdown()
except:
turtle_reader.get_logger().info(nodename+" stopped")
if __name__ == '__main__':
main()
Modificar setup.py
En los puntos de entrada del archivo setup.py, debes especificar los nombres de los nodos y la función a ejecutar (main)
entry_points={
'console_scripts': [
'control_turtle = projects.control_turtle:main',
'read_turtle = projects.read_turtle:main',
],
},
Compilación del paquete
colcon build --packages_select projects --symlink-install
Nodos de lanzamiento
Para lanzar un nodo en un terminal, es necesario el código fuente del proyecto
source /opt/ros/iron/setup.bash cd ~/ros2_ws source install/local_setup.bash
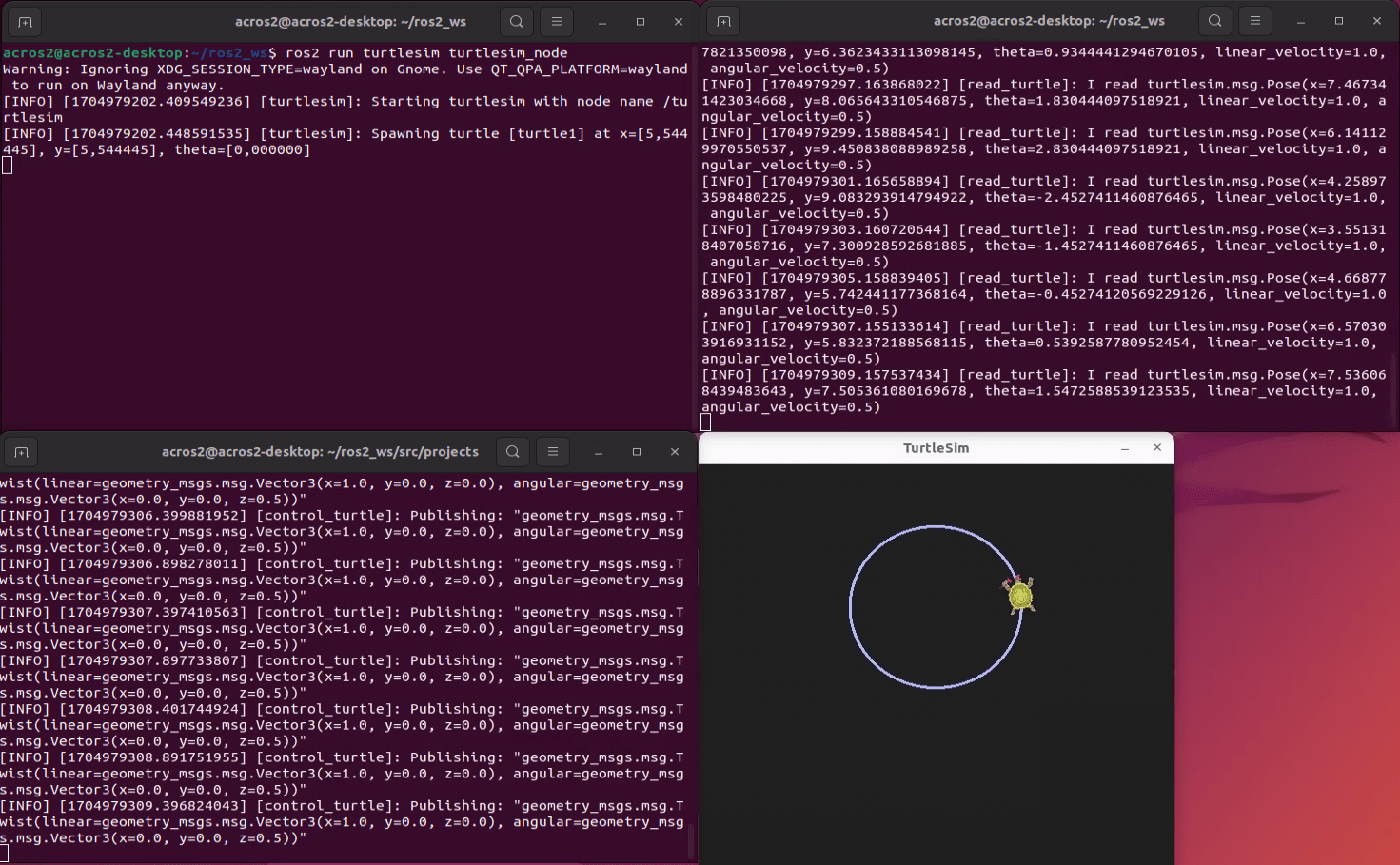
En tres terminales diferentes, ejecute los siguientes comandos
ros2 run turtlesim turtlesim_node #terminal1 ros2 run projects read_turtle #terminal2 ros2 run projects control_turtle #terminal3
Resultados
Puedes ver cómo la tortuga describe la forma de un círculo y el cambio de posición en el centro del abonado.
Lanzar un nodo con argumentos
Los nodos pueden configurarse en tiempo de ejecución. En este ejemplo, vamos a definir los parámetros de entrada para la velocidad lineal y angular. Así que vamos a modificar el código en el Editor de arriba
En la inicialización del nodo, declaramos los parámetros con los valores por defecto
self.declare_parameter('x', 1.0)
self.declare_parameter('z', 0.5)
A continuación, podemos recuperar el valor de estos parámetros y almacenarlos en variables que utilizamos en la función de devolución de llamada
self.linx = self.get_parameter('linx').get_parameter_value().double_value
self.angz = self.get_parameter('angz').get_parameter_value().double_value
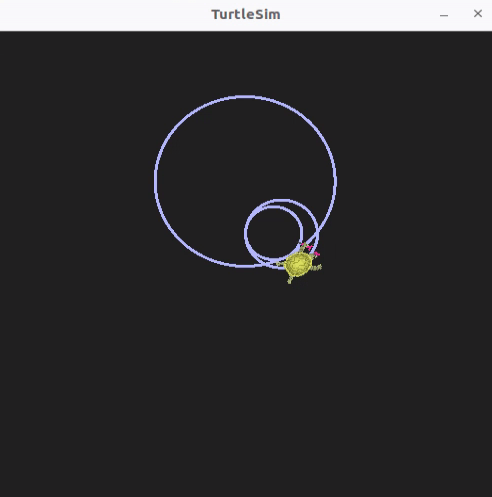
Ahora puede lanzar un nodo con y sin la etiqueta
ros2 run projects circle_turtle #default param ros2 run projects circle_turtle --ros-args -p linx:=0.5 -p angz:=1.0
Código completo
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# control_turtle.py
import rclpy #rospy
from rclpy.node import Node
from std_msgs.msg import String
from turtlesim.msg import Pose
from geometry_msgs.msg import Twist
import os
nodename= os.path.splitext(os.path.basename(__file__))[0]
class TurtleController(Node):
def __init__(self):
super().__init__(nodename)
self.get_logger().info(nodename+" started")
self.publisher_ = self.create_publisher(
Twist,
'/turtle1/cmd_vel',
10)
self.declare_parameter('linx', 1.0)
self.declare_parameter('angz', 0.5)
self.linx = self.get_parameter('linx').get_parameter_value().double_value
self.angz = self.get_parameter('angz').get_parameter_value().double_value
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
#msg = String()
#msg.data = 'Hello World: %d' % self.i
msg = Twist()
msg.linear.x = self.linx
msg.angular.z = self.angz
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg)
self.i += 1
def main(args=None):
#os.system('ros2 service call /reset std_srvs/srv/Empty') #reset pos
rclpy.init(args=args)
turtle_controller = TurtleController()
try:
rclpy.spin(turtle_controller)
turtle_controller.destroy_node()
rclpy.shutdown()
except:
turtle_controller.get_logger().info(nodename+" stopped")
if __name__ == '__main__':
main()
Abrir los distintos terminales con un script
Para ahorrar tiempo durante el desarrollo, puede abrir terminales y lanzar nodos desde un único script bash
#open terminal and run turtlesim gnome-terminal -- $SHELL -c "source ros_profile && ros2 run turtlesim turtlesim_node;exec $SHELL" gnome-terminal -- $SHELL -c "source ros_profile && ros2 run projects control_turtle;exec $SHELL"
Solución de problemas
- Caducidad de SetupTools
Compruebe la versión de setuptools
python3 import setuptools setuptools.__version__
‘59.6.0’
Instalar pip
sudo apt install python3-pip
a continuación, instale la versión 58.2.0 de setuptools
python3 -m pip install setuptools==58.2.0



