La programación es un generador de código Arduino genérico. Ayuda a generar códigos basados en cada elemento seleccionado con bibliotecas, definiciones y funciones básicas. La programación le permite obtener código funcional para administrar o probar varios dispositivos al mismo tiempo
Arrastre y suelte o haga doble clic en el elemento de la columna izquierda en la zona de colocación y haga clic en mostrar código para generar código Arduino basado en los elementos seleccionados.
Este proyecto tiene como objetivo recopilar todos los tutoriales sobre Arduino o Raspberry Pi (u otro microcontrolador) y ayudar a los principiantes a crear nuevos códigos. .
No dude en enviarnos un mensaje y háganos saber sus pensamientos e ideas para futuras actualizaciones.
CommunicationSensorOutputShield
Communication
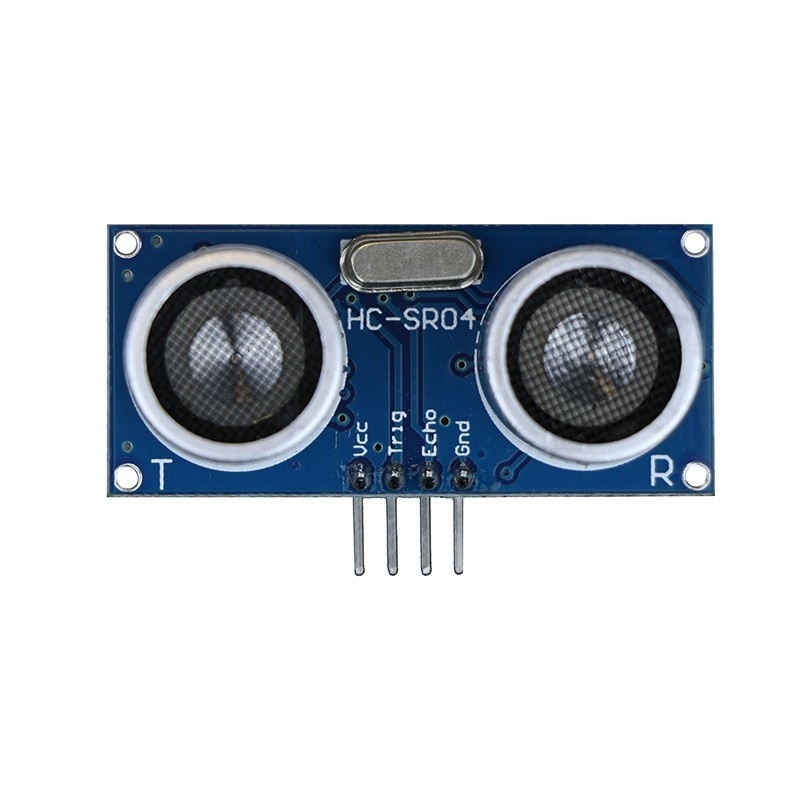
Sensor
Output
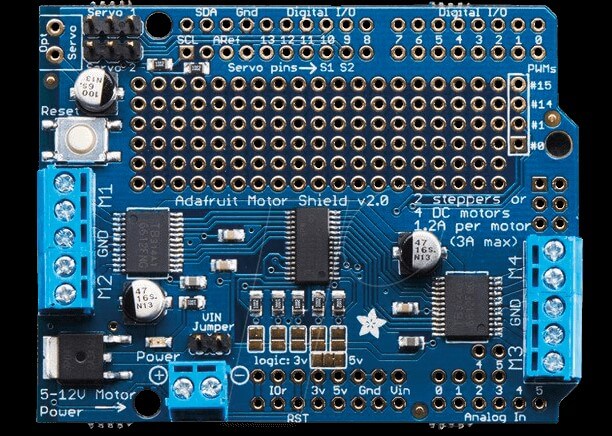
Shield
ESP8266 Wifi Connection
El ESP8266 NodeMCU tiene un chip incorporado para conectarse a WiFi.
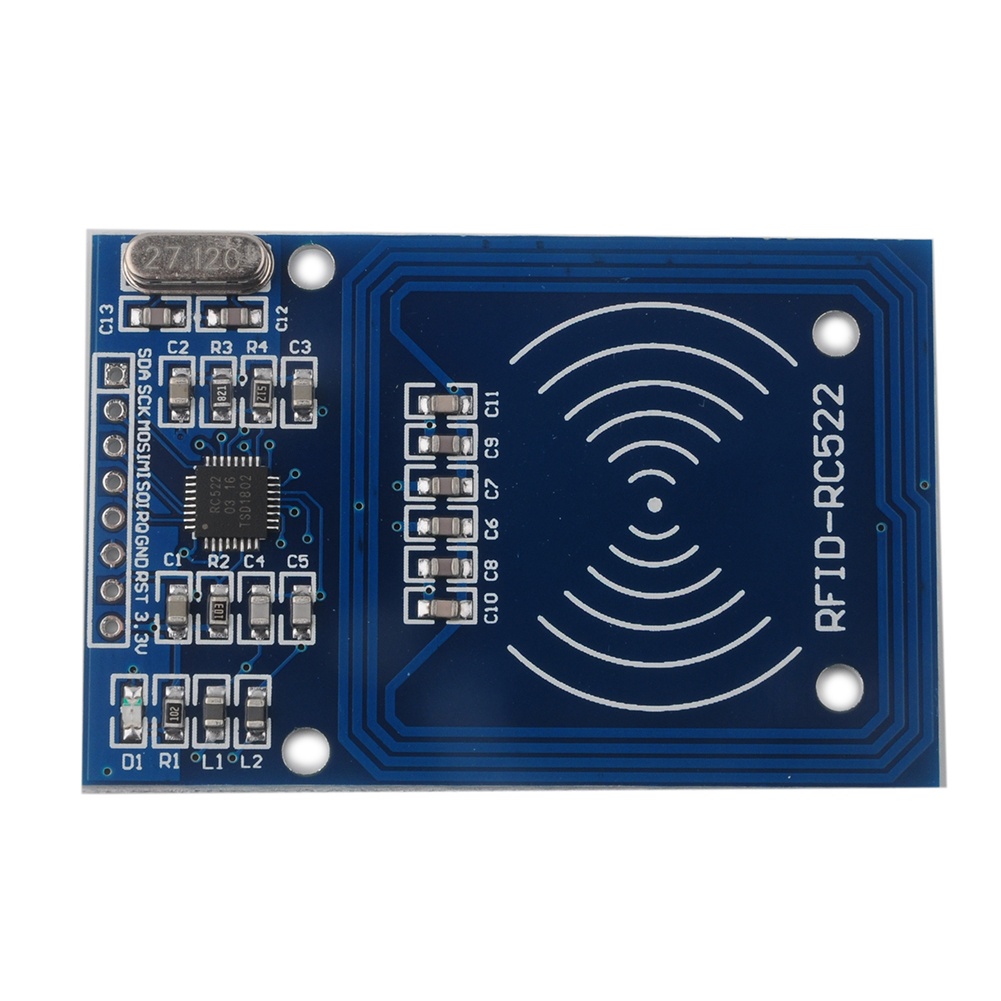
El protocolo I2C es un protocolo de comunicación en serie que permite que dos dispositivos intercambien datos. En el bus hay un dispositivo ‘Maestro’ y hasta 128 dispositivos ‘Esclavos’.
Una salida analógica corresponde a un módulo que envía un valor discreto generalmente entre 0 y 5V
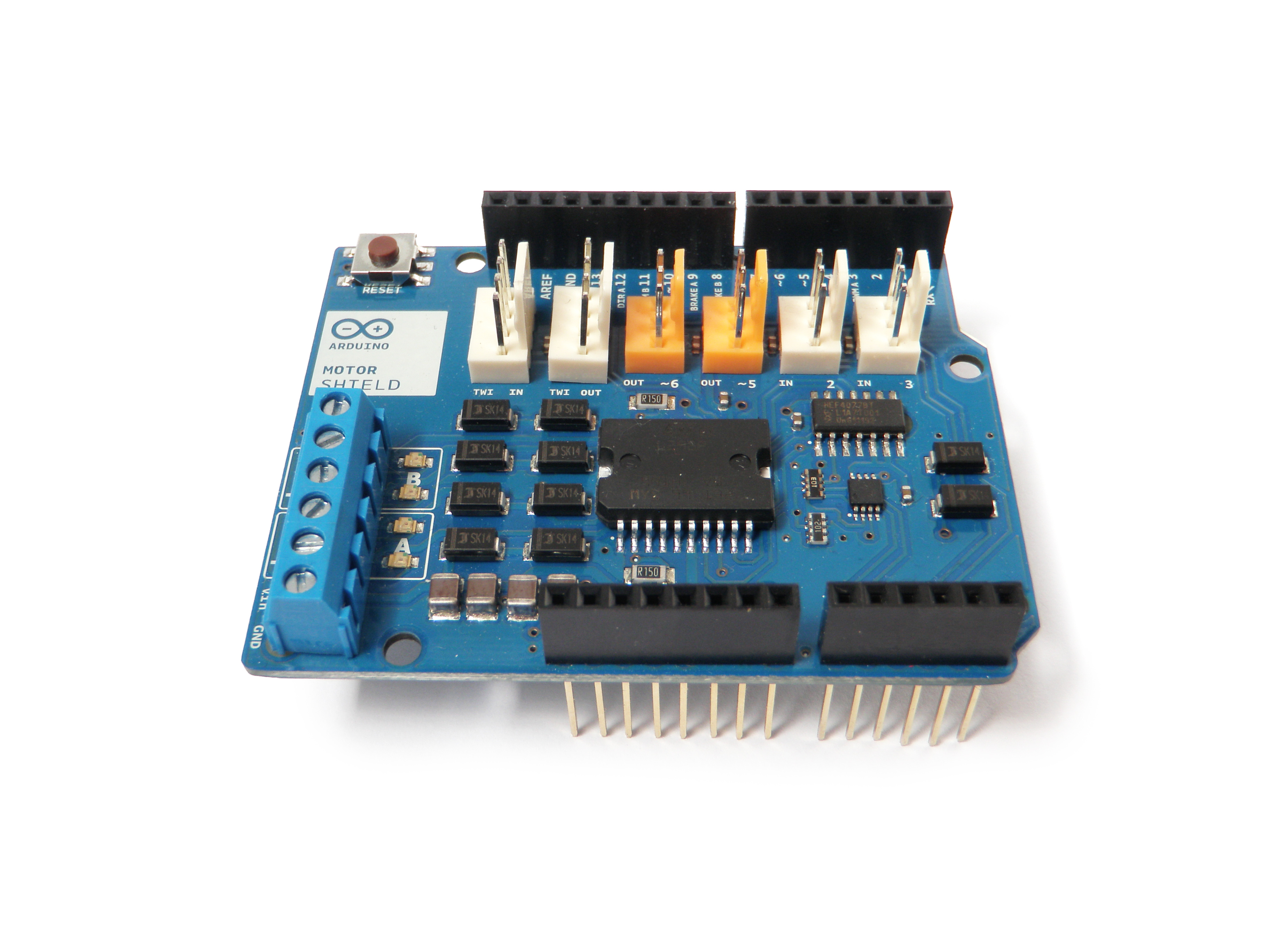
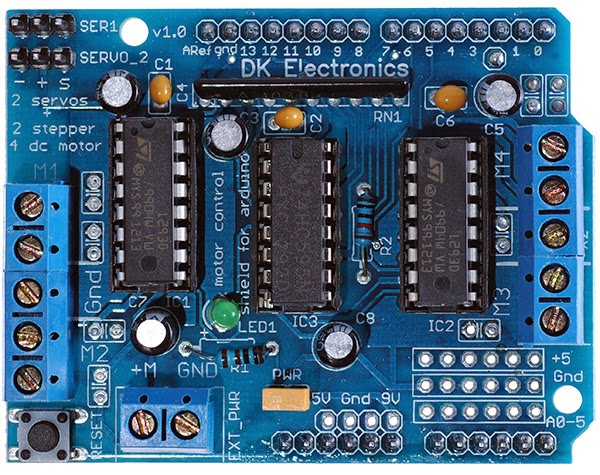
Moteur CC
Los motores de corriente continua (CC) convierten la energía eléctrica en rotación. Genera rotación continua cuando se aplica un voltaje constante a sus terminales. La velocidad de rotación es proporcional al voltaje aplicado.
Una tira de LED RGB direccionable controla el color y el brillo de los LED que la componen individualmente
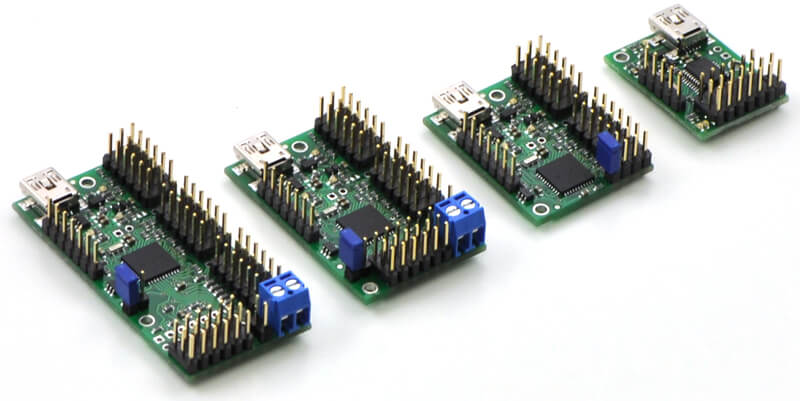
Serial Servo Controller
El módulo Maestro de Pololu es un controlador serie que permite controlar varios servomotores simplemente utilizando la comunicación serie del microcontrolador.
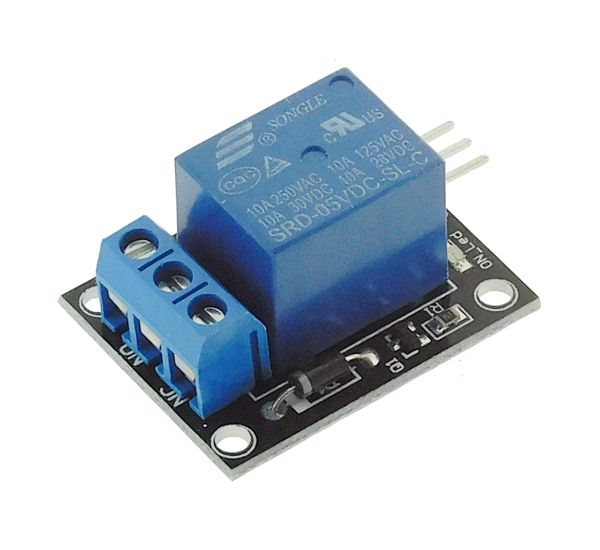
El relé es un interruptor controlado que aísla la parte electrónica de la parte de potencia.
Servo
Los servomotores son motores de CC acoplados con electrónica y engranajes. La electrónica permite controlar el motor en posición cuando se aplica una señal PWM y los engranajes permiten aumentar el par del motor eléctrico. Hay dos tipos de servomotores, servos controlados por posición y servos controlados por velocidad. El servomotor con control de velocidad tiene la particularidad de la rotación continua, a diferencia del servomotor con control de posición, que generalmente tiene una amplitud de 180°.