Dans ce tutoriel, nous allons voir comment créer et lancer des script Python sous ROS2. Vous pourrez ainsi créer vos propres noeuds et commencer à développer sous ROS.
Créer un espace de travail
Une bonne pratique pour développer sous ROS2 est de créer des workspaces dans lesquels on va installer les paquets désirés, séparés de l’installation principale.
Installation de colcon
sudo apt install python3-colcon-common-extensionsCréer le dossier
mkdir -p ~/tuto_ws/src
cd ~/tuto_wsCopier ensuite un projet type, comme tutoriel contenant turtlesim
git clone https://github.com/ros/ros_tutorials.git -b ironPuis construisez le projet à l’aide de la commande
colcon buildPour charger votre workspace dans un nouveau terminal
source /opt/ros/iron/setup.bash
cd ~/ros2_ws
source install/local_setup.bashN.B.: vous pouvez mettre les commandes suivantes dans un fichier ros_profile pour le source en une seule commande « source ros_profile »
Créer un Package python
ROS2 offre un outil simple pour créer l’architecture de fichiers d’un paquets Python ou C++. Vous devez alors spécifier au moins le nom du paquet (my_paquet). Il est possible également de donner le nom du nœud.
Dans le répertoire ~/ros2_sw/src, entrez la commande suivante
ros2 pkg create --build-type ament_python --license Apache-2.0 --node-name my_node my_package --license Apache-2.0le script python se trouve alors dans le répertoire ~/ros2_ws/src/my_package/my_package
Une fois le paquet créé, vous pouvez ajouter autant de nœud que vous le souhaitez dans ce dossier.
Il faudra penser à mettre à jour les fichiers setup.py et package.xml avec les dépendances et points d’entrée
Installer les dépendances
Avant de compiler le projet, il est conseillé de résoudre les dépendances.
rosdep install -i --from-path src --rosdistro iron -yCompiler le projet
Il est possible de compiler le projet entier ou de sélectionner un paquet en particulier
colcon build --packages_select my_package --symlink-installN.B.: symlink-install permet de ne pas recompiler à chaque changement du script Python
Lancer le nœud
Une fois le paquet compilé, vous pouvez lancer le nœud à partir de la commande
ros2 run my_package my_nodeLe code de base lors de la création d’un nœud
def main():
print('Hi from my_package.')
if __name__ == '__main__':
main()Au lancement ce code affichera simplement le text du print
Création d’un Publisher et d’un Subscriber pour Turtlesim
Nous allons voir dans cet exemple, comment créer un paquet avec deux nœuds, l’un venant contrôler la tortue, l’autre, venant lire la position.
Création du paquet
ros2 pkg create --build-type ament_python --license Apache-2.0 --node-name projects control_turtle --license Apache-2.0Voici l’architecture de fichiers désiré
.
├── LICENSE
├── package.xml
├── projects
│ ├── control_turtle.py
│ └── read_turtle.py
├── setup.cfg
└── setup.pyAjouter les scripts Python
- Publisher control_turtle.py
On importe le type de message à publier Twist pour le contrôle de la vitesse de la tortue
On se connecte au topic en précisant le nom (‘/turtle1/cmd_vel’) et le type de donnée (Twist)
On crée un timer qui nous permettra de publier régulièrement sur le topic (create_timer)
Enfin on publie la vitesse linéaire et angulaire
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# control_turtle.py
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
import os
# Node should have the same name as the node file
nodename= os.path.splitext(os.path.basename(__file__))[0]
class TurtleController(Node):
def __init__(self):
super().__init__(nodename)
self.get_logger().info(nodename+" started")
self.publisher_ = self.create_publisher(
Twist,
'/turtle1/cmd_vel',
10)
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
#msg = String()
#msg.data = 'Hello World: %d' % self.i
msg = Twist()
msg.linear.x = 1.0
msg.angular.z = 0.5
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg)
self.i += 1
def main(args=None):
rclpy.init(args=args)
turtle_controller = TurtleController()
try:
rclpy.spin(turtle_controller)
turtle_controller.destroy_node()
rclpy.shutdown()
except:
turtle_controller.get_logger().info(nodename+" stopped")
if __name__ == '__main__':
main()- Subscriber read_turtle.py
On importe le type de message à publier Pose
On se connecte au topic en précisant le nom (‘/turtle1/pose’) et le type de donnée (Pose)
On écrit la fonction d’écoute qui s’exécute lorsqu’une une nouvelle donnée est disponible sur le topic
On crée un timer qui nous permettra d’afficher les valeurs à la fréquence désirée
Enfin on publie la vitesse linéaire et angulaire
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# control_turtle.py
import rclpy #rospy
from rclpy.node import Node
from turtlesim.msg import Pose
import os
# Node should have the same name as the node file
nodename= os.path.splitext(os.path.basename(__file__))[0]
class TurtleReader(Node):
def __init__(self):
super().__init__(nodename)
self.get_logger().info(nodename+" started")
self.subscription = self.create_subscription(
Pose,
'/turtle1/pose',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
self.timer = self.create_timer(2, self.timer_callback)
self.msg = None
def listener_callback(self, msg):
self.msg = msg
def timer_callback(self):
self.get_logger().info("I read %s" % self.msg )
def main(args=None):
rclpy.init(args=args)
turtle_reader = TurtleReader()
try:
rclpy.spin(turtle_reader)
turtle_reader.destroy_node()
rclpy.shutdown()
except:
turtle_reader.get_logger().info(nodename+" stopped")
if __name__ == '__main__':
main()Modifier le fichier setup.py
Dans les points d’entrée du fichier setup.py, vous devez spécifier les noms des noeuds ainsi que la fonction à lancer (main)
entry_points={
'console_scripts': [
'control_turtle = projects.control_turtle:main',
'read_turtle = projects.read_turtle:main',
],
},Compiler le paquet
colcon build --packages_select projects --symlink-installLancer les noeuds
Pour lancer un noeud dans un terminal, vous devez sourcer le projet
source /opt/ros/iron/setup.bash
cd ~/ros2_ws
source install/local_setup.bashDans trois terminaux différents, lancez les commandes suivantes
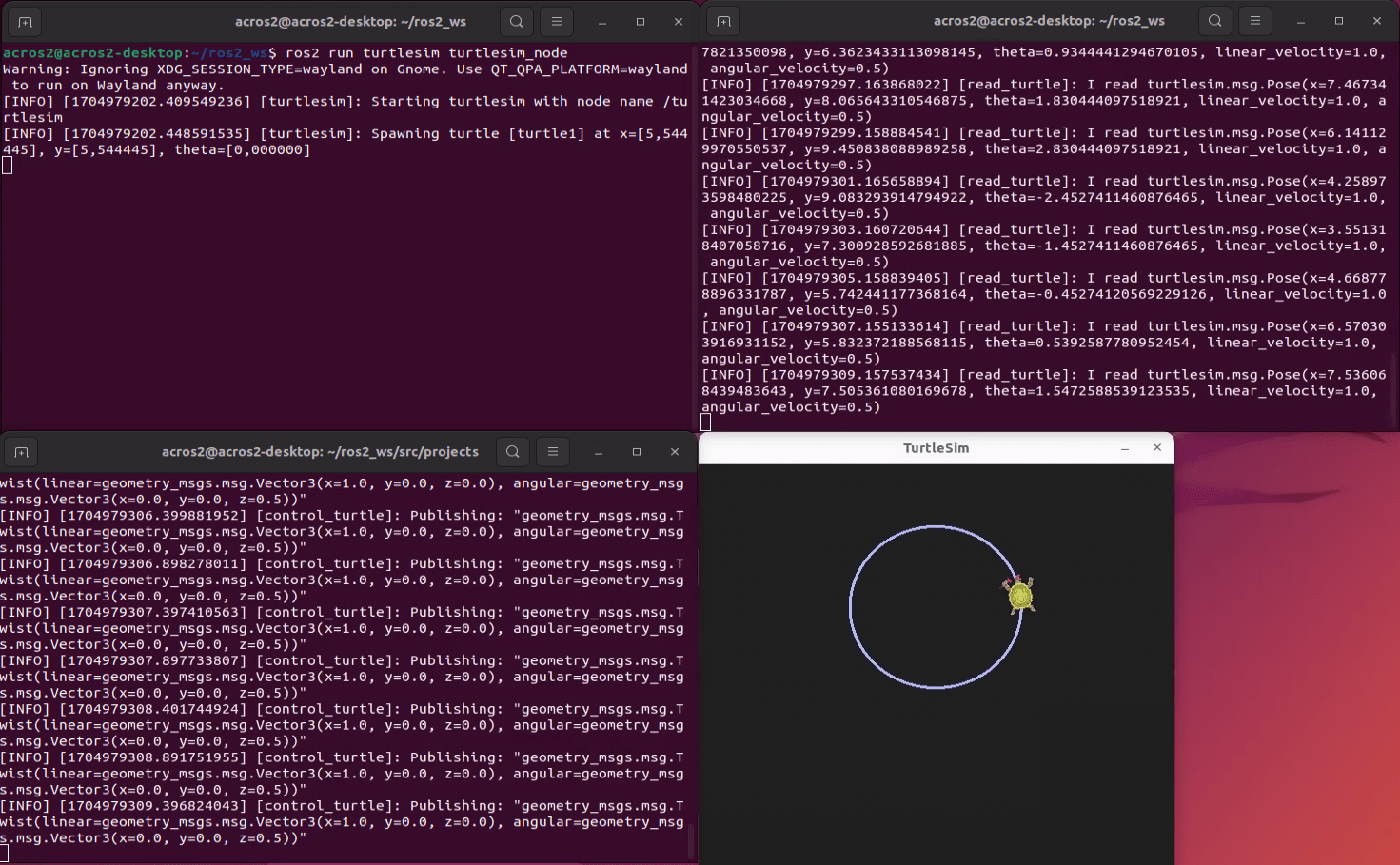
ros2 run turtlesim turtlesim_node #terminal1
ros2 run projects read_turtle #terminal2
ros2 run projects control_turtle #terminal3Résultat
Vous pouvez voir la tortue décrire la forme d’un cercle et la position évoluer dans la fenêtre du subscriber
Lancer un noeud avec des arguments
Il est possible de configurer les noeuds lors de leur exécution. Dans cet exemple, nous allons définir des paramètre d’entrée pour la vitesse linéaire et angulaire. Nous allons donc modifier le code du Publieur ci-dessus
Dans l’initialisation du noeud, nous déclarons les paramètres avec les valeurs par défaut
self.declare_parameter('x', 1.0)
self.declare_parameter('z', 0.5)Nous pouvons ensuite récupérer la valeur de ces paramètres pour les stocker dans des variables que nous utilisons dans la fonction callback
self.linx = self.get_parameter('linx').get_parameter_value().double_value
self.angz = self.get_parameter('angz').get_parameter_value().double_valueVous pouvez désormais lancer un noeud avec et sans paramètre
ros2 run projects circle_turtle #default param
ros2 run projects circle_turtle --ros-args -p linx:=0.5 -p angz:=1.0
Code complet
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#
# control_turtle.py
import rclpy #rospy
from rclpy.node import Node
from std_msgs.msg import String
from turtlesim.msg import Pose
from geometry_msgs.msg import Twist
import os
nodename= os.path.splitext(os.path.basename(__file__))[0]
class TurtleController(Node):
def __init__(self):
super().__init__(nodename)
self.get_logger().info(nodename+" started")
self.publisher_ = self.create_publisher(
Twist,
'/turtle1/cmd_vel',
10)
self.declare_parameter('linx', 1.0)
self.declare_parameter('angz', 0.5)
self.linx = self.get_parameter('linx').get_parameter_value().double_value
self.angz = self.get_parameter('angz').get_parameter_value().double_value
timer_period = 0.5 # seconds
self.timer = self.create_timer(timer_period, self.timer_callback)
self.i = 0
def timer_callback(self):
#msg = String()
#msg.data = 'Hello World: %d' % self.i
msg = Twist()
msg.linear.x = self.linx
msg.angular.z = self.angz
self.publisher_.publish(msg)
self.get_logger().info('Publishing: "%s"' % msg)
self.i += 1
def main(args=None):
#os.system('ros2 service call /reset std_srvs/srv/Empty') #reset pos
rclpy.init(args=args)
turtle_controller = TurtleController()
try:
rclpy.spin(turtle_controller)
turtle_controller.destroy_node()
rclpy.shutdown()
except:
turtle_controller.get_logger().info(nodename+" stopped")
if __name__ == '__main__':
main()Ouvrir les différents terminaux avec un script
Pour gagner du temps lors de votre développement, vous pouvez ouvrir les terminaux et lancer les noeuds à partir d’un seul script bash
#open terminal and run turtlesim gnome-terminal -- $SHELL -c "source ros_profile && ros2 run turtlesim turtlesim_node;exec $SHELL" gnome-terminal -- $SHELL -c "source ros_profile && ros2 run projects control_turtle;exec $SHELL"
Troubleshoot
- SetupTools deprecation
Vérifier la version setuptools
python3
import setuptools
setuptools.__version__‘59.6.0’
Installer pip
sudo apt install python3-pippuis installer la version 58.2.0 de setuptools
python3 -m pip install setuptools==58.2.0