
Uma funcionalidade muito interessante para desenvolver no seu robô é o controlo remoto através do smartphone. Um robô controlado por telemóvel pode ser facilmente construído utilizando o Arduino e um módulo Bluetooth.
Hardware
- Robô móvel Rovy
- 4x TTGM
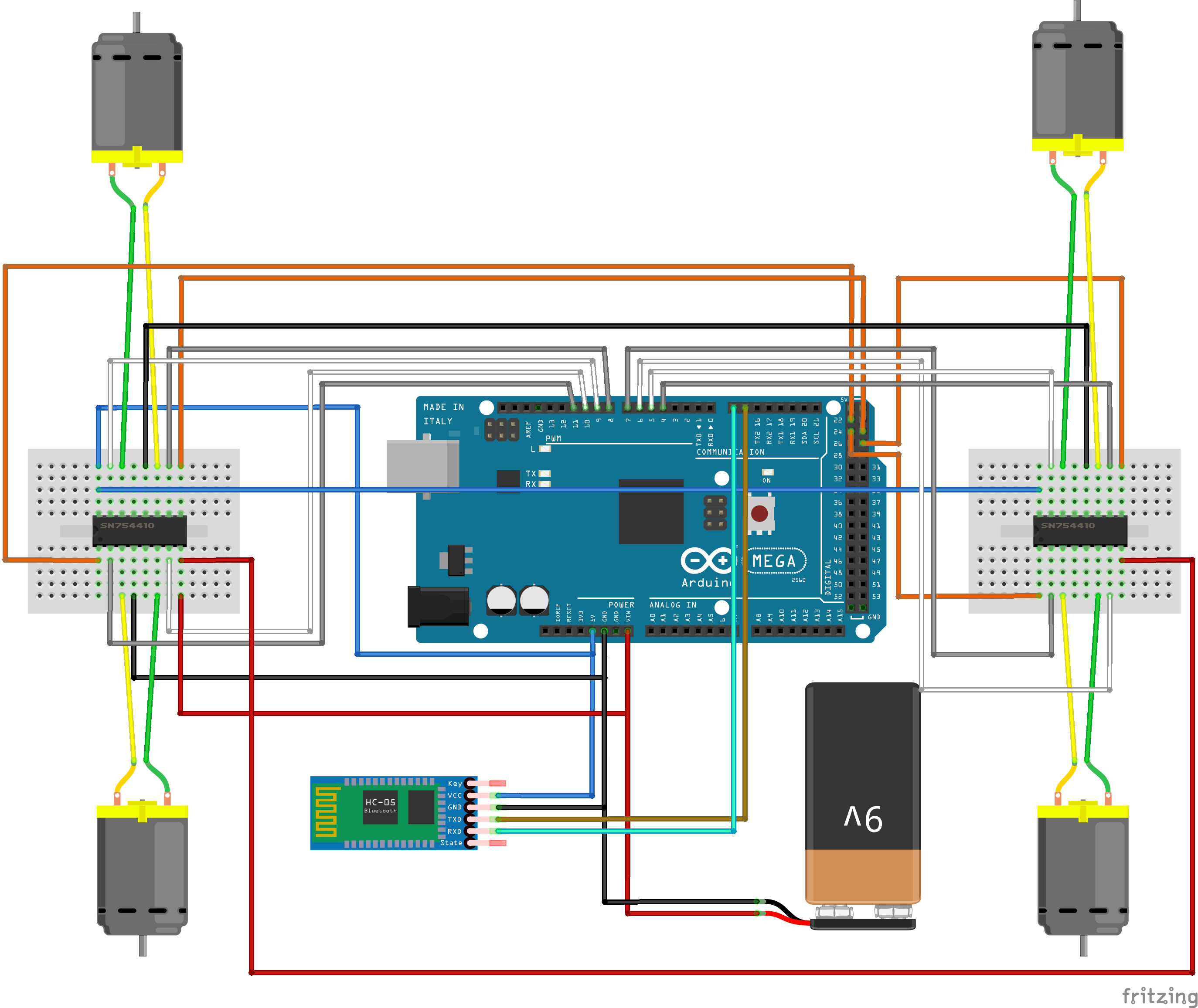
- Motor DC (aqui estamos a usar um shield de prototipagem Arduino Mega e 2x SN754410 H-bridge)
- Bateria de 7,4V
- Módulo Bluetooth HC-06
- Arduino Mega
- Smartphone Android
Estrutura
Neste projeto, estamos a utilizar o robô móvel Rovy, mas esta solução pode ser aplicada a qualquer tipo de robô programável.

Hardware
- Microcontrolador
O cartão deve ter entradas suficientes.
- Condutor
Para controlar a velocidade e a direção de um motor DC, são frequentemente utilizadas pontes H como a SN754410.
- HC-06
Para comunicar sem fios com o robot, um dos métodos mais simples é utilizar um módulo Bluetooth HC-06 ligado ao Arduino.
Esquema de montagem
Interface
Pode ser criada uma aplicação simples utilizando o Processing ou o App Inventor 2. A aplicação inclui quatro botões que representam as direcções do robô, um botão e um ecrã para gerir a ligação Bluetooth. Pode descarregar o projeto da aplicação aqui.
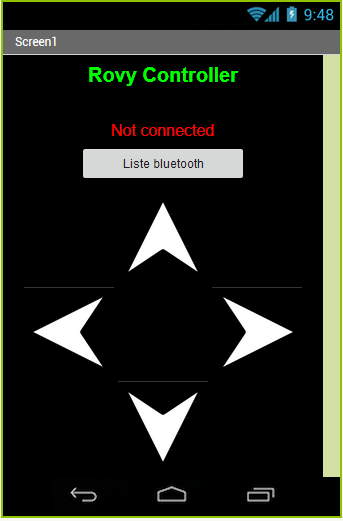
Quando um botão de direção é premido, o comando correspondente é enviado via Bluetooth sob a forma de um carácter.
|
Botão |
Encomendar |
Movimento |
|
Topo |
“F” |
Avançar |
|
Esquerda |
“L” |
Virar à esquerda |
|
Certo |
“R” |
Virar à direita |
|
Baixa |
“B” |
Para trás |
|
“S” |
Parar |
Si aucun bouton n’est pressé la commande “S” est envoyée.
Software
O programa a ser implementado no Arduino pode ser dividido em passos simples. Ler o comando do módulo Bluetooth, selecionar uma função a partir do comando recebido e controlar os motores de acordo com o movimento selecionado.
Ler o comando do módulo HC-06
Na placa Arduino Mega, estão predefinidas 3 portas série. Com outra placa, teria de utilizar a biblioteca SoftwareSerial.h. Para mais informações, leia o tutorial sobre o módulo HC-06.
if (Serial3.available()>=MESSAGE_BYTES) { // If data is available to read delay(3); if( Serial3.read() == HEADER) { state = (char)Serial3.read(); // read it and store it in val } } Serial.print("Recieved : "); Serial.println(state);
Selecionar a função de movimento correspondente ao comando
Saiba como utilizar a palavra-chave switch.
movementEnable(); switch(state){ case 'F': GoAvançar(Power); Serial.println("Robot walking"); break; case 'B': GoPara trás(Power); Serial.println("Robot backing"); break; case 'R': TurnRight(Power); Serial.println("turn right"); break; case 'L': TurnLeft(Power); Serial.println("turn left"); break; default://S Parar(); Serial.println("resting"); break; }
Verificação dos motores de corrente contínua
Veja como acionar um motor DC aqui.
void movementEnable(){ digitalWrite(enableBridge1,HIGH); digitalWrite(enableBridge2,HIGH); digitalWrite(enableBridge3,HIGH); digitalWrite(enableBridge4,HIGH); } void movementDisable(){ digitalWrite(enableBridge1,LOW); digitalWrite(enableBridge2,LOW); digitalWrite(enableBridge3,LOW); digitalWrite(enableBridge4,LOW); } void GoAvançar(int Power){ analogWrite(MotorAvançar1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorAvançar2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorAvançar3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorAvançar4,Power); analogWrite(MotorReverse4,0); } void GoPara trás(int Power){ analogWrite(MotorAvançar1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorAvançar2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorAvançar3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorAvançar4,0); analogWrite(MotorReverse4,Power); } void TurnRight(int Power){ analogWrite(MotorAvançar1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorAvançar2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorAvançar3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorAvançar4,0); analogWrite(MotorReverse4,Power); } void TurnLeft(int Power){ analogWrite(MotorAvançar1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorAvançar2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorAvançar3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorAvançar4,Power); analogWrite(MotorReverse4,0); } void Parar(){ analogWrite(MotorAvançar1,0); analogWrite(MotorReverse1,0); analogWrite(MotorAvançar2,0); analogWrite(MotorReverse2,0); analogWrite(MotorAvançar3,0); analogWrite(MotorReverse3,0); analogWrite(MotorAvançar4,0); analogWrite(MotorReverse4,0); movementDisable(); }
Código completo
#include <Servo.h> #include <SoftwareSerial.h> //SoftwareSerial HC06(2,3); // If board different from Mega // Motors definition const int enableBridge1 = 22; const int enableBridge2 = 23; const int enableBridge3 = 24; const int enableBridge4 = 25; const int MotorAvançar1 = 11; const int MotorReverse1 = 10; const int MotorAvançar2 = 8; const int MotorReverse2 = 9; const int MotorAvançar3 = 7; const int MotorReverse3 = 6; const int MotorAvançar4 = 4; const int MotorReverse4 = 5; //Serial port #define HEADER '|' #define MESSAGE_BYTES 2 // the total bytes in a message char state='S'; // Parameters int Power = 80; //Motor velocity /******************************************************************\ * PRIVATE FUNCTION: setup * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Initiate inputs/outputs * \******************************************************************/ void setup(){ Serial3.begin(9600); Serial.begin(9600); delay(500); } /******************************************************************\ * PRIVATE FUNCTION: loop * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Main Function of the code \******************************************************************/ void loop(){ if (Serial3.available()>=MESSAGE_BYTES) { // If data is available to read delay(3); if( Serial3.read() == HEADER) { state = (char)Serial3.read(); // read it and store it in val } } Serial.print("Recieved : "); Serial.println(state); movementEnable(); switch(state){ case 'F': GoAvançar(Power); Serial.println("Robot walking"); break; case 'B': GoPara trás(Power); Serial.println("Robot backing"); break; case 'R': TurnRight(Power); Serial.println("turn right"); break; case 'L': TurnLeft(Power); Serial.println("turn left"); break; default://S Parar(); Serial.println("resting"); break; } } /******************************************************************\ * PRIVATE FUNCTION: movementEnable * * PARAMETERS: * ~ void * * RETURN: * ~ void * * DESCRIPTIONS: * Enable motor control \*****************************************************************/ void movementEnable(){ digitalWrite(enableBridge1,HIGH); digitalWrite(enableBridge2,HIGH); digitalWrite(enableBridge3,HIGH); digitalWrite(enableBridge4,HIGH); } void movementDisable(){ digitalWrite(enableBridge1,LOW); digitalWrite(enableBridge2,LOW); digitalWrite(enableBridge3,LOW); digitalWrite(enableBridge4,LOW); } /******************************************************************\ * PRIVATE FUNCTION: GoAvançar * * PARAMETERS: * ~ int Power motor velocity * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void GoAvançar(int Power){ analogWrite(MotorAvançar1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorAvançar2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorAvançar3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorAvançar4,Power); analogWrite(MotorReverse4,0); } /******************************************************************\ * PRIVATE FUNCTION: GoPara trás * * PARAMETERS: * ~ int Power motor velocity * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void GoPara trás(int Power){ analogWrite(MotorAvançar1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorAvançar2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorAvançar3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorAvançar4,0); analogWrite(MotorReverse4,Power); } /******************************************************************\ * PRIVATE FUNCTION: TurnRight * * PARAMETERS: * ~ int Power motor velocity * * RETURN: * ~ void * * DESCRIPTIONS: * \*****************************************************************/ void TurnRight(int Power){ analogWrite(MotorAvançar1,Power); analogWrite(MotorReverse1,0); analogWrite(MotorAvançar2,0); analogWrite(MotorReverse2,Power); analogWrite(MotorAvançar3,Power); analogWrite(MotorReverse3,0); analogWrite(MotorAvançar4,0); analogWrite(MotorReverse4,Power); } void TurnLeft(int Power){ analogWrite(MotorAvançar1,0); analogWrite(MotorReverse1,Power); analogWrite(MotorAvançar2,Power); analogWrite(MotorReverse2,0); analogWrite(MotorAvançar3,0); analogWrite(MotorReverse3,Power); analogWrite(MotorAvançar4,Power); analogWrite(MotorReverse4,0); } void Parar(){ analogWrite(MotorAvançar1,0); analogWrite(MotorReverse1,0); analogWrite(MotorAvançar2,0); analogWrite(MotorReverse2,0); analogWrite(MotorAvançar3,0); analogWrite(MotorReverse3,0); analogWrite(MotorAvançar4,0); analogWrite(MotorReverse4,0); movementDisable(); }
Resultados
Se desejar obter mais informações sobre este projeto, deixe um comentário ou envie-nos uma mensagem.